软件环境配置
集群网络拓扑结构说明
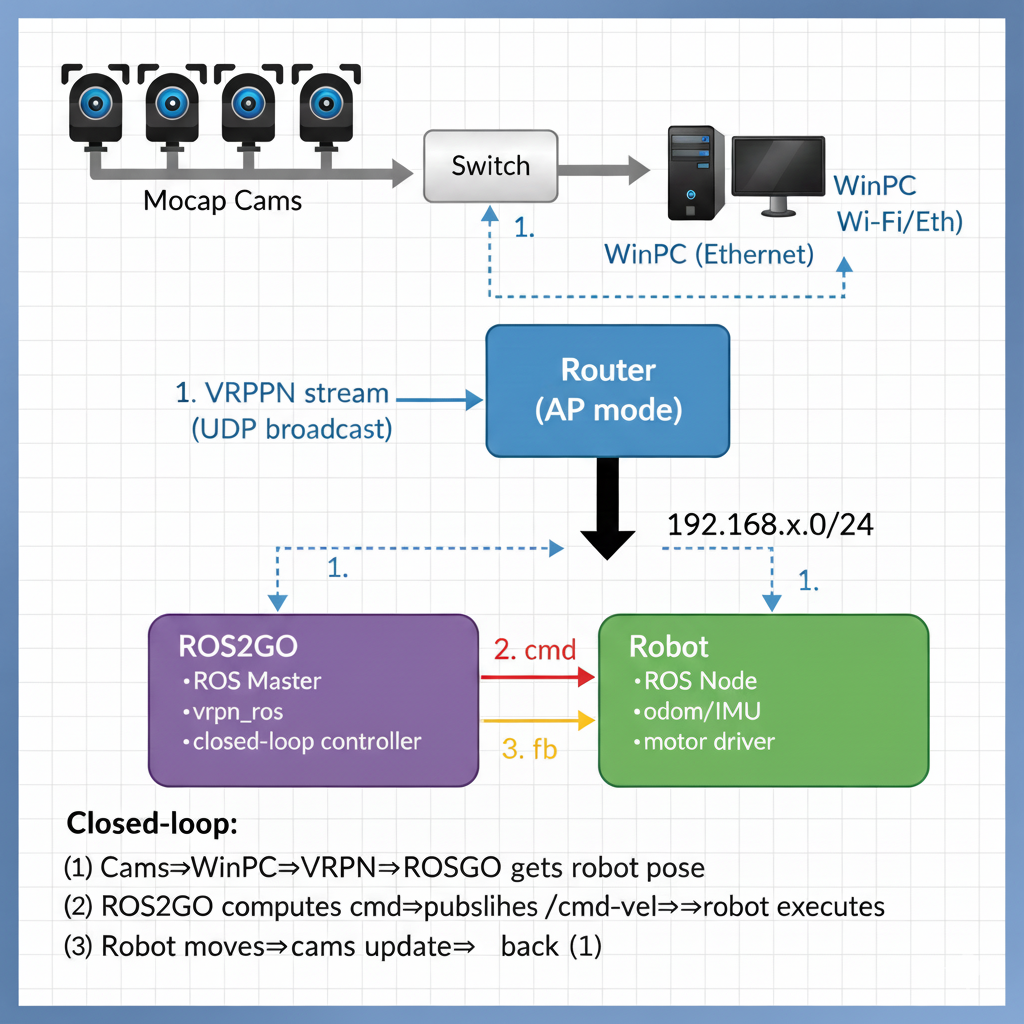
这张系统拓扑图描述了一个典型的动捕闭环控制系统:
感知层:动捕相机捕捉标志点,通过交换机传给 WinPC,由 VRPN 协议广播位姿数据。
决策层:ROS2GO 运行 vrpn_client_ros 节点接收位姿,并作为 ROS Master 计算 PID 或轨迹跟踪指令。
执行层:小车通过 Wi-Fi 接收 /cmd_vel,驱动电机,同时回传里程计/IMU 等机器人数据。
路由器配置
连接路由器
首先,将配套的路由器上电开启。
在主机上,连接到路由器TIANBOT-SWARM-5G,默认密码www.tianbot.com
登录路由器后台
- 路由器 IP:
10.168.1.1 - 路由器后台账号:
admin - 路由器后台密码:
www.tianbot.com

查看连接状态信息
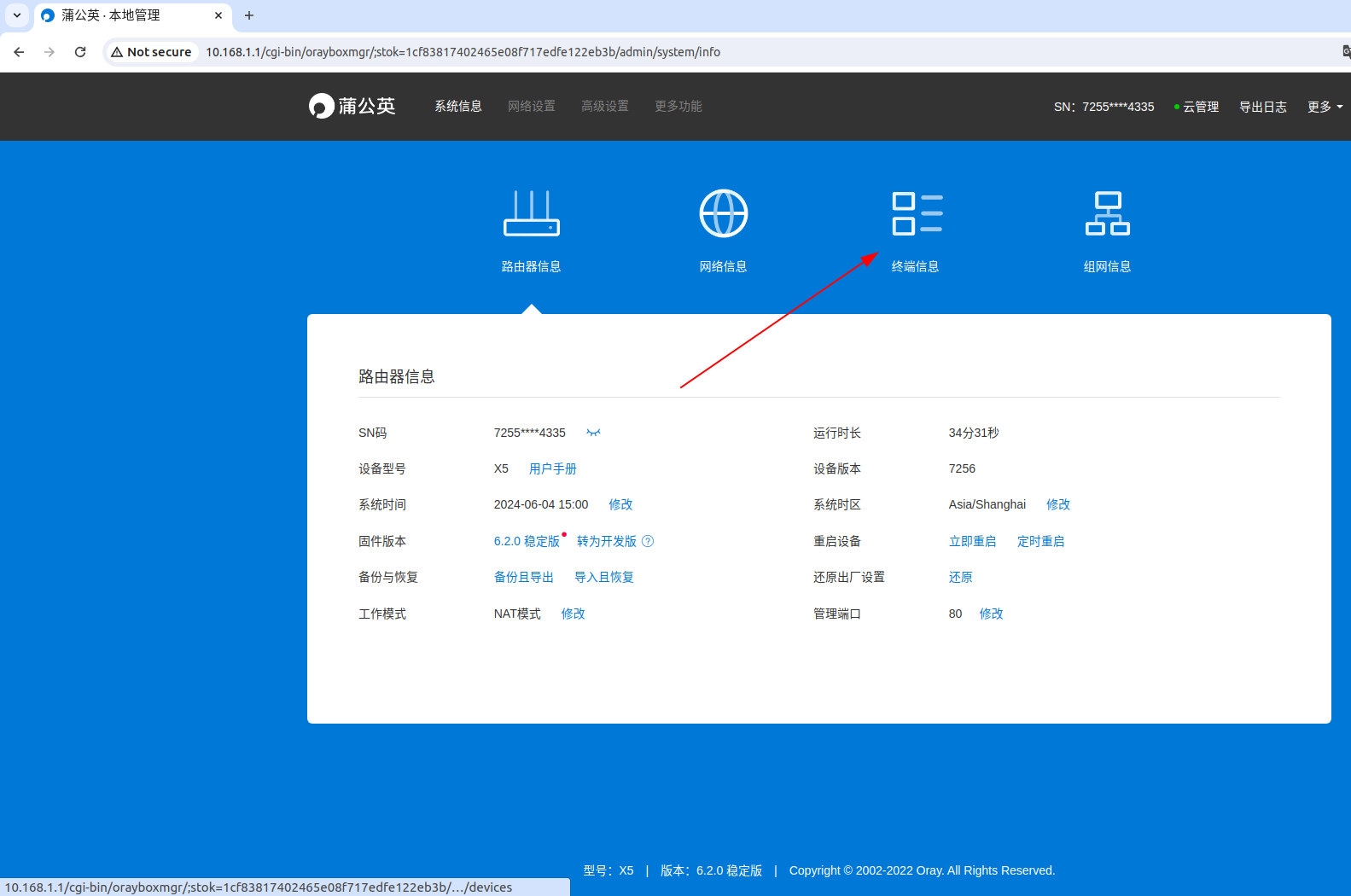
可以看到此时路由器只有控制主机这一个终端设备
刷新页面,可以看到此时第一个 TOM06S 设备已接入

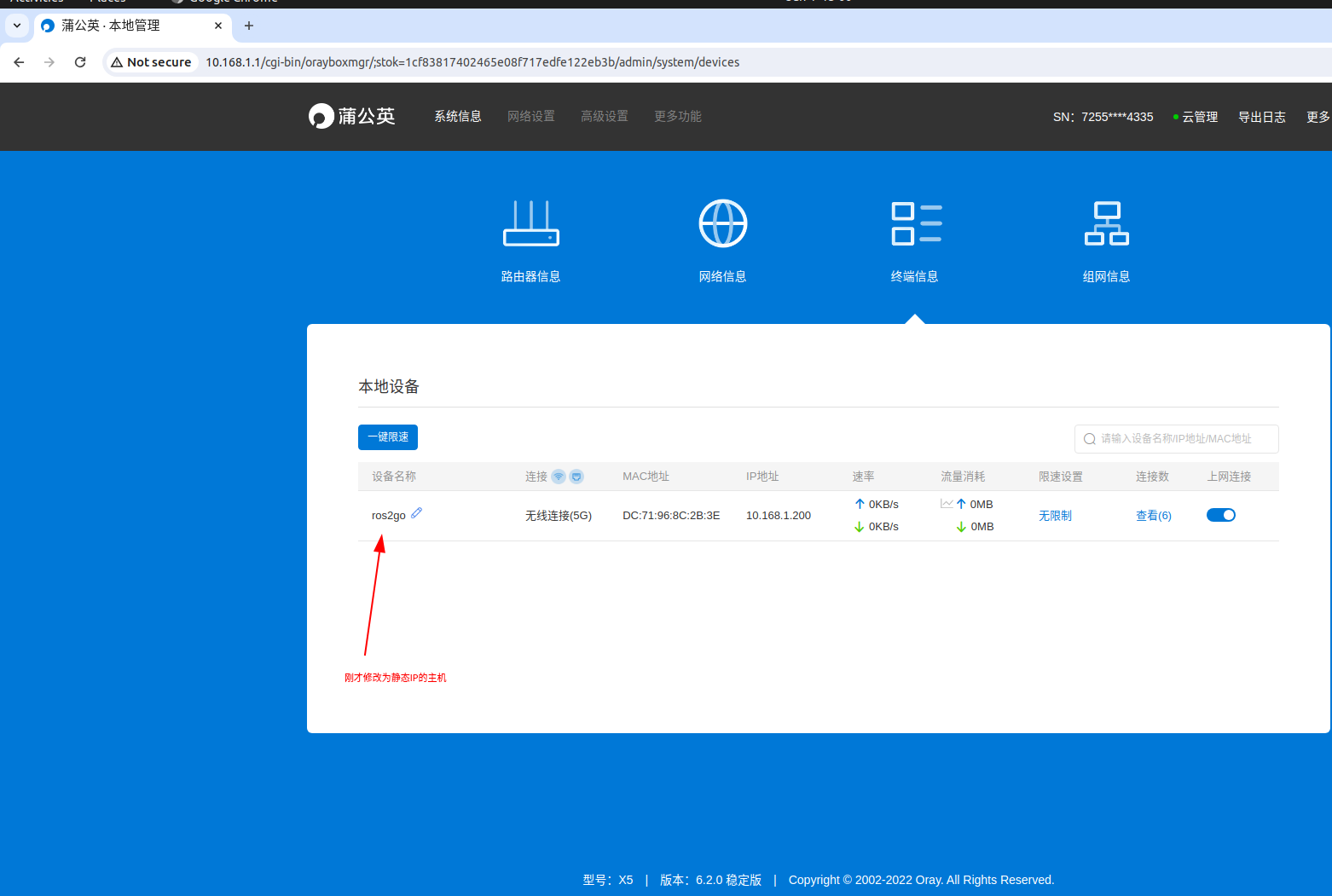
在路由器上,查看设备连接状态信息。
- 可以看到已连接设备的
IP, - 已连接设备 IP 网段为:
10.168.1.100/255
根据已连接设备的个数,与小车数量进行比对,确保各车已连接到路由器。
软件环境配置
修改主机 IP
首先,将使用的控制主机连接到路由器AP,
- 路由器
TIANBOT-SWARM-5G - 默认密码
www.tianbot.com
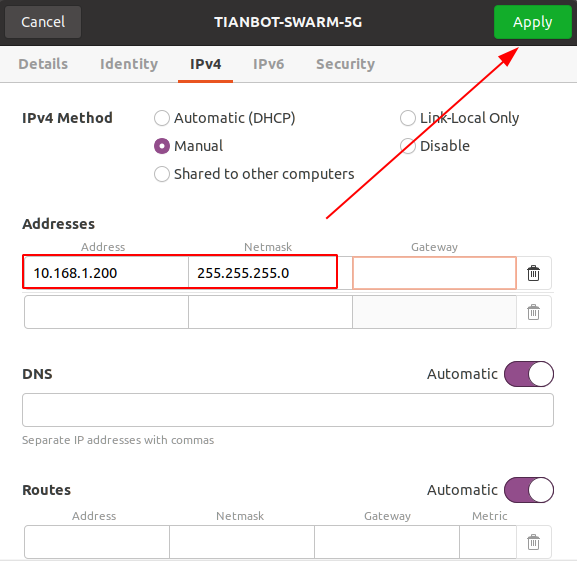
然后手动修改wlan0的IP地址为10.168.1.200,
修改 wlan0 为静态 IP
bash
gnome-control-center可以看到此时主机的IP地址为10.168.1.100,我们需要将它修改为10.168.1.200
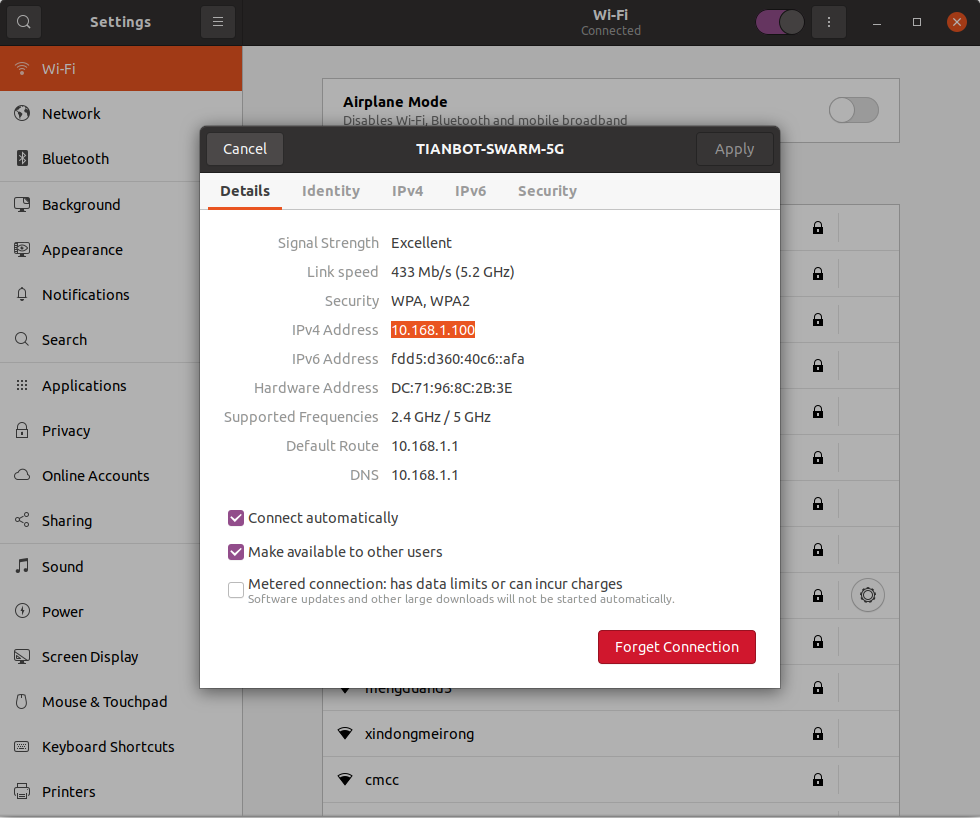
然后,从DHCP模式切换到Manual(自定义模式),修改 IP 地址为10.168.1.200,子网掩码为255.255.255.0,然后点击 Apply(应用)
然后使用如下命令重启网络服务
bash
service network-manager restart # 重启网络服务然后重启电脑,(这一步比较关键)

bash
ifconfig查看当前 IP 地址

此时已经成功修改到10.168.1.200
并输入如下命令,启动ROS_MASTER
bash
roscore
远程连接
ssh 远程连接
bash
tianbot@ros2go:~$ ssh tianbot@10.168.1.101
_____ ____ _____ ___ _____ ____
| __ \ / __ \ / ____|__ \ / ____|/ __ \
| |__) | | | | (___ ) | | __| | | |
| _ /| | | |\___ \ / /| | |_ | | | |
| | \ \| |__| |____) |/ /_| |__| | |__| |
|_| \_\\____/|_____/|____|\_____|\____/
tianbot@10.168.1.101's password:
Welcome to ROS2GO(Base on Ubuntu 20.04.5 LTS) (GNU/Linux 6.3.3-x64v1-xanmod1 x86_64)
* Documentation: http://doc.tianbot.com
* Support: https://www.tianbot.com
621 更新可以立即应用。
要查看这些附加更新,请运行:apt list --upgradable
The list of available updates is more than a week old.
To check for new updates run: sudo apt update
Last login: Mon Jun 3 17:45:49 2024 from 10.168.1.102
tianbot@tianbot:~$- 登录密码为
ros
bash
tianbot@tianbot:~$ ls
Arduino catkin_ws Downloads ros1.env Templates tianbot_ws
arduino-1.8.12 Desktop Pictures ros2.env tianbot_mini_ws此时设备用户名已经变为 tianbot
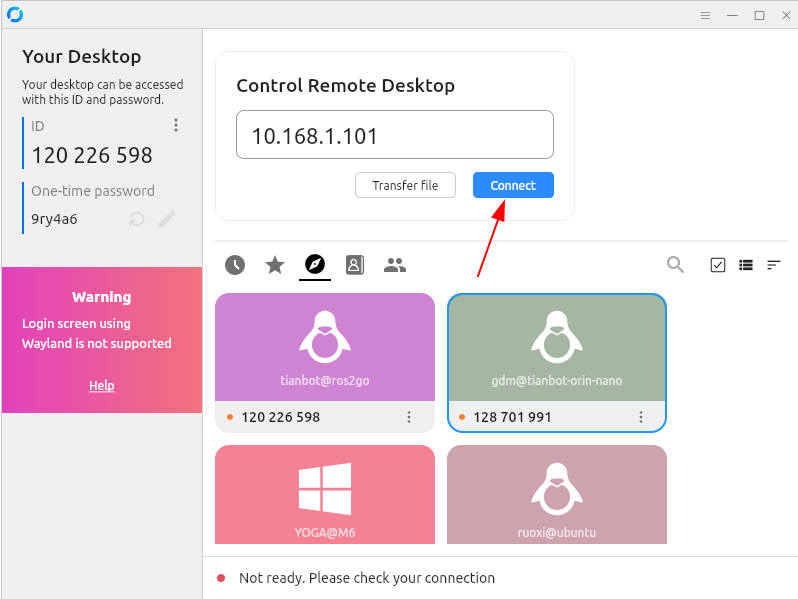
Rustdesk
点击 connect 连接
点击 OK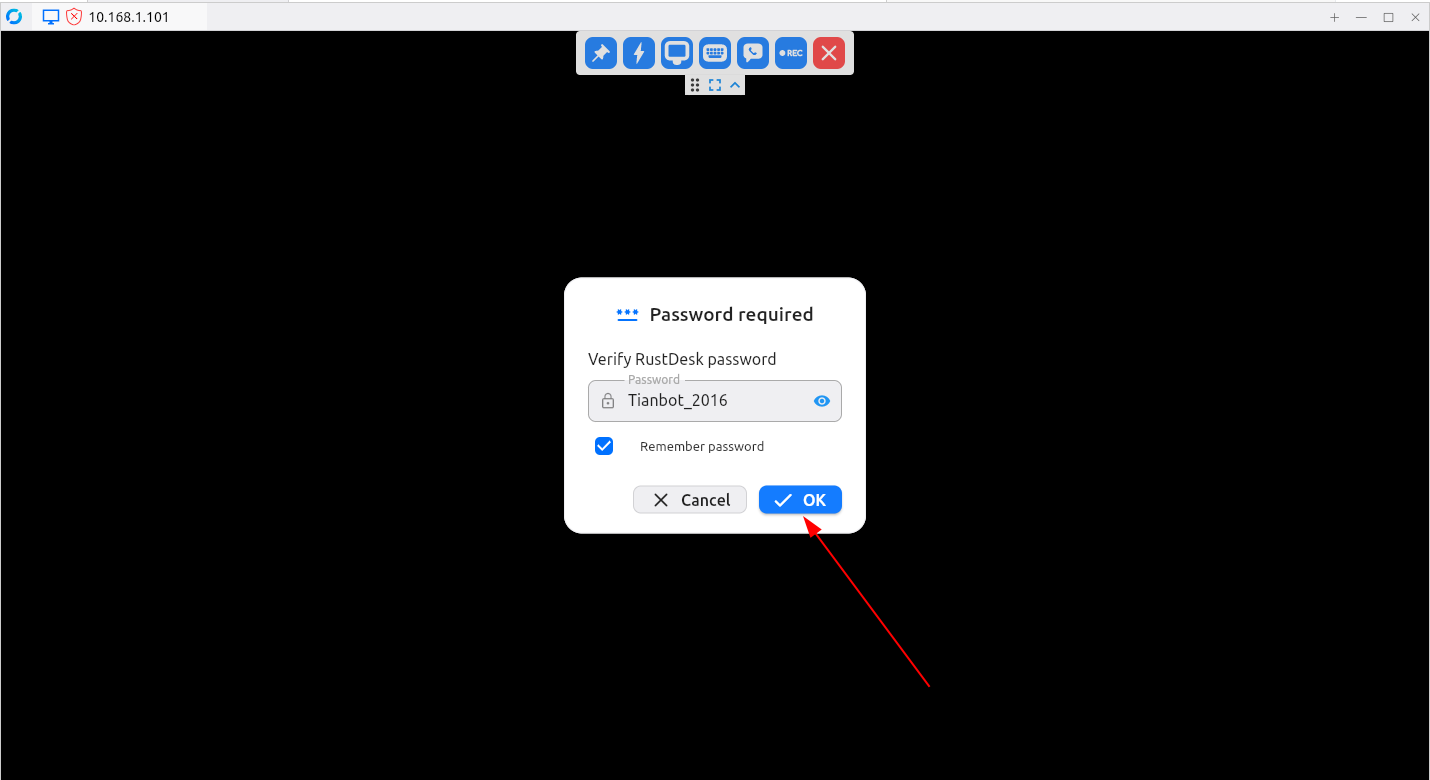
成功登录后,点击全屏

此时画面正常

- 具体连接方法和详细步骤,可参考Rustdesk 连接教程