自主导航
因传感器的不同,支持三种不同模式:激光导航、磁导航、二维码导航
激光导航-AMCL
保存地图后,下列程序会使用默认地图进行导航.
shell
roslaunch tianbot_navigation tianbot_nav.launch如果正确配置了ROS的多机互联, 可以在控制台电脑上打开RViz进行查看
shell
roslaunch tianbot_rviz view_nav_amcl.launch激光导航-eband
eband是一种全向局部导航方案,我们首先在底盘运算平台上启动导航
shell
$ roslaunch tianbot_nav tianbot_nav_eband.launch如果正确配置了ROS的多机通信, 可以在控制台电脑上打开RViz进行查看,同时可以利用rviz给定机器人导航目标点。
shell
$ rviz巡磁导航
磁导航传感器的由下位机直接处理,只需底盘上电启动,修改遥控器控制方式,即可直接进行巡磁模式。
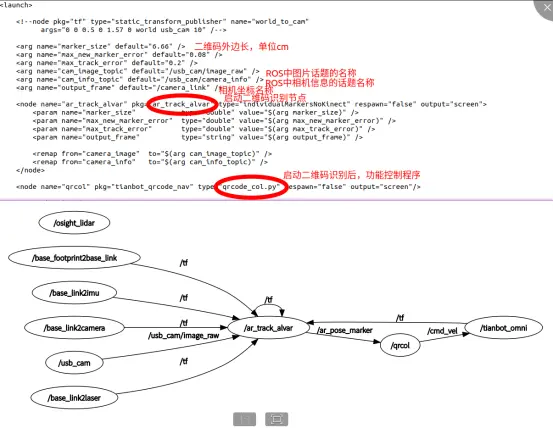
二维码导航
- 生成二维码图片(.png格式)
shell
$ roscore
$ rosrun ar_track_alvar createMarker 0
$ rosrun ar_track_alvar createMarker 1
$ rosrun ar_track_alvar createMarker 100上面命令分别生成了号码为0/1/100的二维码,文件格式为.png,文件位置在当前目录
- 启动导航命令
shell
roslaunch tianbot_bringup tianbot_bringup.launch
roslaunch tianbot_qrcode_nav tianbot_qrnav_alvar.launch- 入口节点解析