首次使用
查看ROS2GO的IP地址(室内WIFI下)
在ROS2GO(即电脑端)连接在室内WIFI的情况下,在终端使用ifconfig查看电脑端当前连接的WIFI所分配的IP地址
修改机器人环境变量(配网工具Tianbot Toolkit下)
切换ROS2GO(电脑端)的WIFI连接,使其连接至配网工具Tianbot Toolkit的WIFI
注意:确保先配置网络信息,再配置机器人环境变量信息
从浏览器登录至192.168.4.1连接到TIANBOT Toolkit工具 修改ROS环境变量信息,填入需要连接的ROBOT NAME和ROS MASTER URI,然后点击配置机器人信息即可,等待 5s 作用,配置成功后,机器人会发出滴滴滴的声音 在下图当中填入ROBOT NAME和ROS_MASTER_URIROBOT NAME是机器人端的节点名称,可以理解为机器人的名称 ROS_MASTER_URI是在上一小步当中使用ifconfig获取到的ROS2GO的ip地址(这个地址是在室内WIFI下分配的)

同时勾选上下方的开机启动 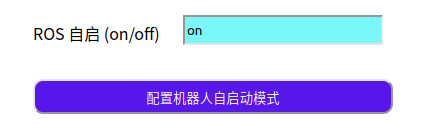
勾选开机启动实际上是在开机时自动运行/home/tianbot/tianbot_ws/src/tianbot/tianbot_bringup/launch/tianbot_bringup.launch这个launch文件
然后点击获取机器人配置信息
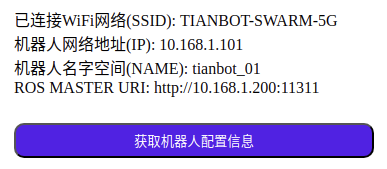
可以看到此时已经配置成功
之后将机器人重启
运行roscore(室内WIFI下)
将ROS2GO的WIFI连接切换至室内WIFI 在ROS2GO上运行roscore,重启机器人,一段时间之后会听到机器人发出滴滴声,证明连接上主节点
注意:如果先启动的机器人,再在ROS2GO上运行roscore可能会出现连接不上的问题 这个时候需要在远程桌面上手动执行launch文件 运行如下命令 roslaunch /home/tianbot/tianbot_ws/src/tianbot/tianbot_bringup/launch/tianbot_bringup.launch
此时在ROS2GO端或是远程的机器人端使用Ctrl+ alt+t 新开一个终端,键入rostopic list

可以看到下列与机器人有关的话题,
- 其中/tianbot_01/则对应了机器人的 Robot_name 参数
- cmd_vel 对应了机器人的速度控制话题
- odom 为机器人的里程计话题
- imu 为机器人的 IMU 话题
- leds 为机器人的灯带控制话题
- uwb 为机器人的 uwb 话题(不可用)
/tianbot_01/base/debug_cmd
/tianbot_01/base/debug_result
/tianbot_01/cmd_vel
/tianbot_01/imu
/tianbot_01/leds
/tianbot_01/odom
/tianbot_01/uwb此时证明机器人端与ROS2GO的主节点通讯完毕
话题数据查看
imu
rostopic echo /tianbot_01/imu输出信息
.........
---
header:
seq: 29535
stamp:
secs: 1717485441
nsecs: 521063851
frame_id: "tianbot_01/imu_link"
orientation:
x: -0.0011857285862788558
y: -0.010002673603594303
z: 0.900090754032135
w: -0.4316977262496948
orientation_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
angular_velocity:
x: 0.00532632227987051
y: -0.001065264455974102
z: 0.003195793367922306
angular_velocity_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
linear_acceleration:
x: 0.026025639846920967
y: -0.008076922968029976
z: 9.775769233703613
linear_acceleration_covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
---
...........odom
rostopic echo /tianbot_01/odom............
---
header:
seq: 32621
stamp:
secs: 1717485503
nsecs: 239931227
frame_id: "tianbot_01/odom"
child_frame_id: "tianbot_01/base_footprint"
pose:
pose:
position:
x: 0.20474901795387268
y: 0.0032143269199877977
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.003529626764987008
w: 0.9999937708480487
covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
twist:
twist:
linear:
x: 0.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0
covariance: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
---运动控制测试
在任意终端上运行(ROS2GO或者远程操控的miniPC)下面两个代码之一,可以发现机器人向前移动了部分距离,运动控制正常
下面两个命令的效果但是一样的
rostopic pub /tianbot_01/cmd_vel geometry_msgs/Twist "{linear: {x: 0.2, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}"rostopic pub /tianbot_01/cmd_vel geometry_msgs/Twist "linear:
x: 0.2
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.0"