首次连接
机器人与遥控器
在产品充满电后,开机,打开遥控器,遥控机器人进行移动(注意此时左上侧的三段开关为扳下状态),若机器人成功移动则证明机器人与遥控器链接正常。
机器人与ROS2GO
在第一次使用机器人时,由于机器人没有与任何局域网进行链接,所以需要使用配网工具Tianbot Toolkit 
连接配网工具Tianbot Toolkit
机器人与配网工具Tianbot Toolkit
首先将配网工具Tianbot Toolkit 连接至机器人的miniPC的USB接口,连接方式如下: 
连接成功之后会显示其AP号(请稍等一段时间) 
ROS2GO与配网工具Tianbot Toolkit
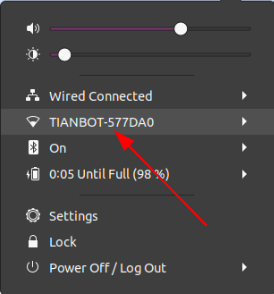
重新扫描当前可连接的wifi,连接到TIANBOT-<AP号>热点(不同配网工具所显示的AP不同,具体以实际显示为主,这里只是做演示,下图连接的即为TIANBOT-577DA0)
然后使用浏览器,输入 ip 为192.168.4.1进入控制台界面,看到下图,则成功连接到TIANBOT Toolkit工具
注意:这里需要关闭VPN,否则不会显示

此时ROS2GO与机器人就连接到由配网工具Tianbot Toolkit构造的同一局域网下,接下来就可以对机器人进行配置了(通过配网工具Tianbot Toolkit)
通过配网工具Tianbot Toolkit配置机器人
获取机器人当前配置信息
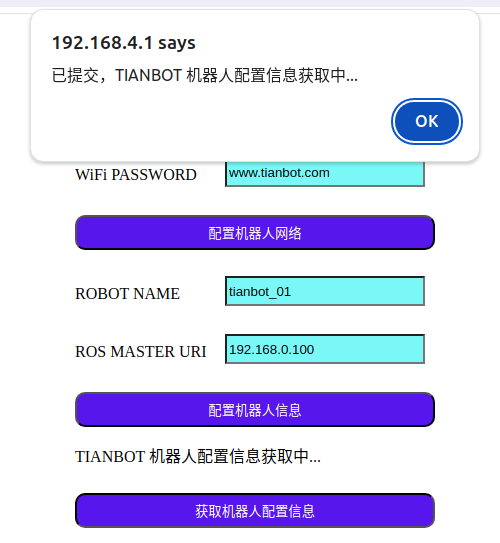
点击获取机器人配置信息,然后看到已提交的提示信息,点击OK,即可看到获取到的配置信息
获取成功后,显示如下图

机器人连接WIFI
第一次连接机器人,此时机器人不知道所处环境的WIFI,这时候就需要配置WIFI 首先修改网络连接配置信息,
- 填入需要连接的
SSID和PASSWORDSSID就是WIFI名称,PASSWORD为WIFI密码 - 然后点击
配置机器人网络按钮即可

配置完成之后下方的机器人配置信息就会更新,显示出已连接WIFI的信息 此时,小车就可以连接到WIFI,并且在配网工具Tianbot Toolkit上会显示连接到WIFI所分配的IP地址
使用ROS2GO的远程桌面登录机器人
切换ROS2GO的WIFI连接
首先在上一步当中我们的ROS2GO连接到了配网工具Tianbot Toolkit所构建的局域网当中,在这一步当中我们需要切换ROS2GO的WIFI连接。 上一步当中我们将机器人连接到了室内的WIFI,此时配网工具Tianbot Toolkit的作用就剩下显示IP的功能(我们的ROS2GO不需要连接Tianbot Toolkit所产生的局域网内了),我们需要将ROS2GO也连接至室内的WIFI(就是机器人连接的SSID).
使用远程桌面软件登录机器人的miniPC
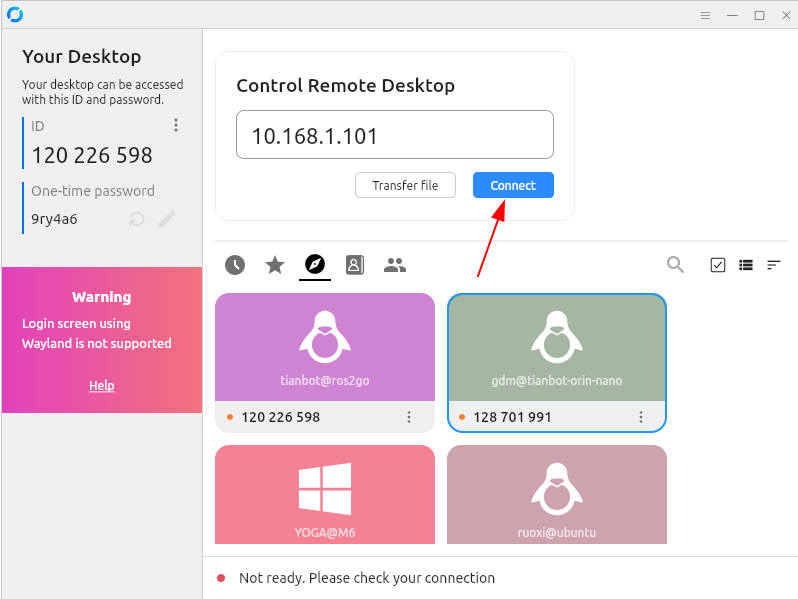
经过上一小步我们的ROS2GO和机器人又处在同一局域网下了(由室内WIFI构成的局域网) 首先我们打开ROS2GO上的Rustdesk软件
在控制远程桌面下的框内输入配网工具Tianbot Toolkit上所显示的IP地址,之后点击 connect 连接
输入密码点击 OK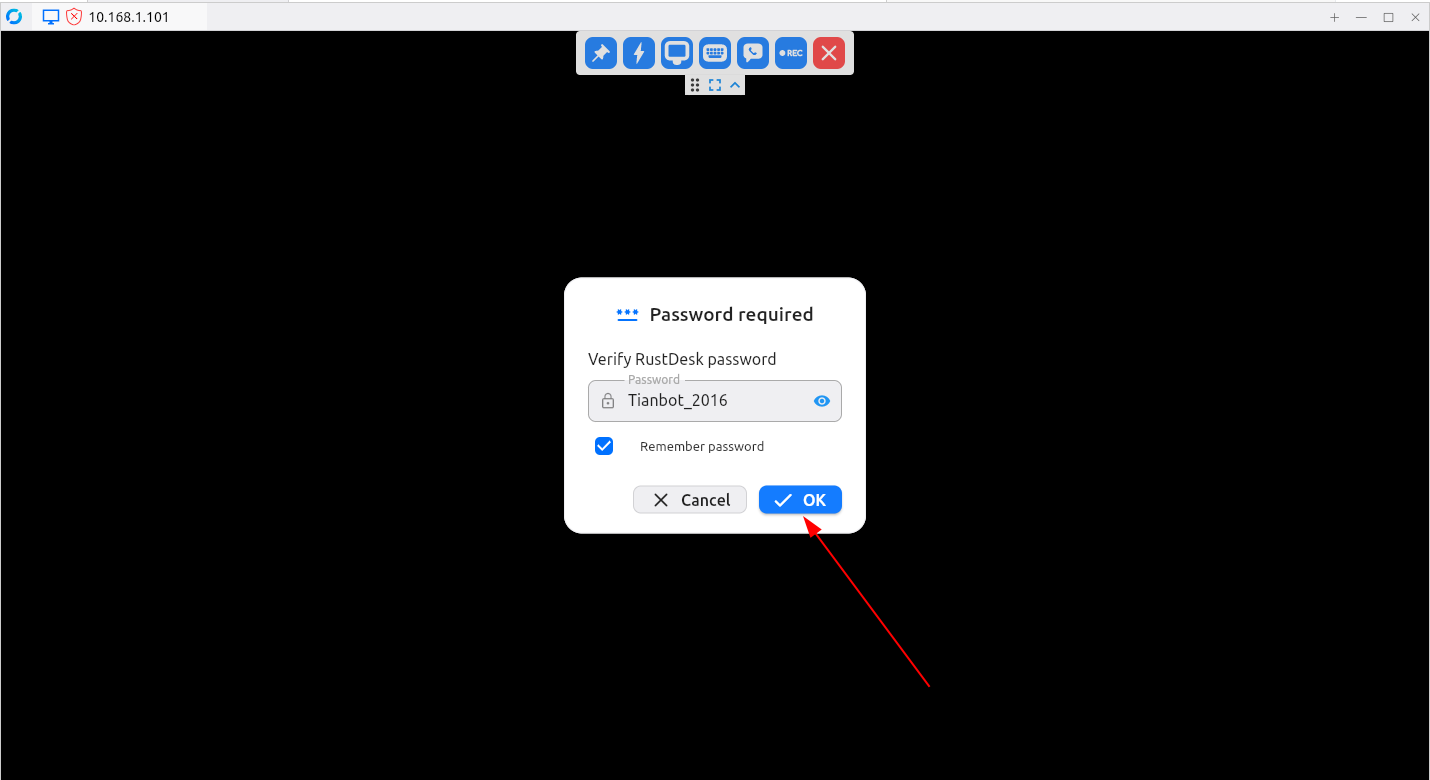
成功登录后,点击全屏

此时画面正常

此时就完成了使用ROS2GO远程登录机器人的过程
- 具体连接方法和详细步骤,可参考Rustdesk 连接教程
视频教程
具体连接方式可以参考以下视频: