小车网络和环境变量配置
注意
本篇所有操作均需要使用 Tianbot Toolkit 工具完成 
工具与小车的连接方式如下 
小车参数配置演示说明
连接到工具 AP 热点
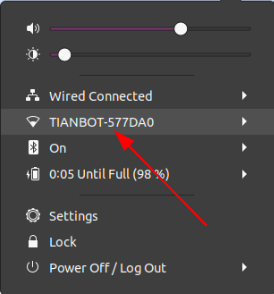
将tianbot toolkit工具,接入TOM06s上位机的USB口,等待5s后,重新扫描当前可连接的wifi,连接到TIANBOT-577DA0热点
打开工具控制台界面
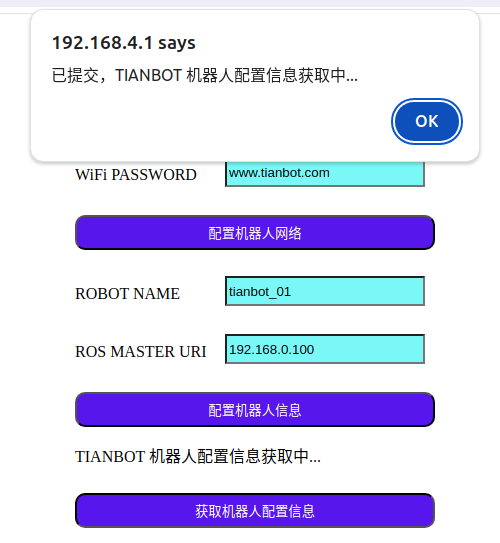
然后使用浏览器,输入 ip 为192.168.4.1进入控制台界面,看到下图,则成功连接到TIANBOT Toolkit工具

获取小车当前配置信息
点击获取机器人配置信息,然后看到已提交的提示信息,点击OK,即可看到获取到的配置信息
获取成功后,显示如下图

可以看到,当前小车的ROS_MASTER_URI为http://localhost:11311,Robot_name为tianbot。如果我们希望将小车连接到TIANBOT-SWARM-5G热点上,小车的参数配置为ROS_MASTER_URI为http://10.168.1.200:11311,Robot_name为tianbot_01,接下来需要修改小车配置信息。
注意
除了电脑连接该工具,也可以使用手机进行配置,更为方便,注意在使手机配置的过程中需要选择保持当前 wifi(不具备上网功能)连接的功能,避免在配置过程中,被换网导致配置失败或是界面卡住的尴尬场面。
修改小车配置信息
需要重点关注的有三个信息 如果需要使用ROS 多机通信,需要配置这两个参数
ROS_MASTER_URIROS_IP
同时也需要给机器人所发出的话题加上命名空间
TIANBOT_NAME(机器人的命名空间)
配置机器人联网信息
- 首先修改网络连接配置信息,
- 填入需要连接的
SSID和PASSWORD, - 然后点击
配置机器人网络按钮即可

注意
重要的事情说三遍!!!!!!!
- 确保先配置网络信息,再配置机器人环境变量信息
- 确保先配置网络信息,再配置机器人环境变量信息
- 确保先配置网络信息,再配置机器人环境变量信息
否则机器人可能无法正常进行多机通信
配置机器人环境变量信息
- 修改
ROS环境变量信息,填入需要连接的ROBOT NAME和ROS MASTER URI,然后点击配置机器人信息即可,等待 5s 作用,配置成功后,小车会发出滴滴滴的声音
注意
举个例子,假设小车此时 IP 为 10.168.1.202,使用者的笔记本电脑 IP 为 10.168.1.200, 在小车与电脑正确接入到同一局域网网络下,可以有以下 3 种配置方式,通常我们会使用前两种方式
| 小车中 ROS_MASTER_URI 中的 IP 字段 | 小车中自动配置的 ROS_IP | 说明备注 |
|---|---|---|
| 10.168.1.200 | 10.168.1.202 | 需要使用者笔记本电脑启动 roscore,作为 ROS_MASTER_URI 主机,小车作为从机 |
| 10.168.1.202 | 10.168.1.202 | 以小车的自身作为 ROS_MASTER_URI,使用者的笔记本电脑为从机 |
| localhost | 127.0.0.1 | 以小车本地回环 localhost 作为 ROS_MASTER_URI,此时小车与使用者的笔记本电脑无法进行多机通信 |
注意
在填入ROS_MASTER_URI时,不需要加上http://开头和:11311的结尾,仅需要填入你希望的ROS_MASTER的主机IP地址即可,如下图中在输入框中仅需填入10.168.1.200

查看确认配置信息
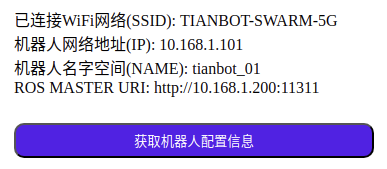
可以看到此时已经配置成功