使用 Nokov 动捕将 VRPN 流发布到 ROS1 广播中
刚体坐标系检查
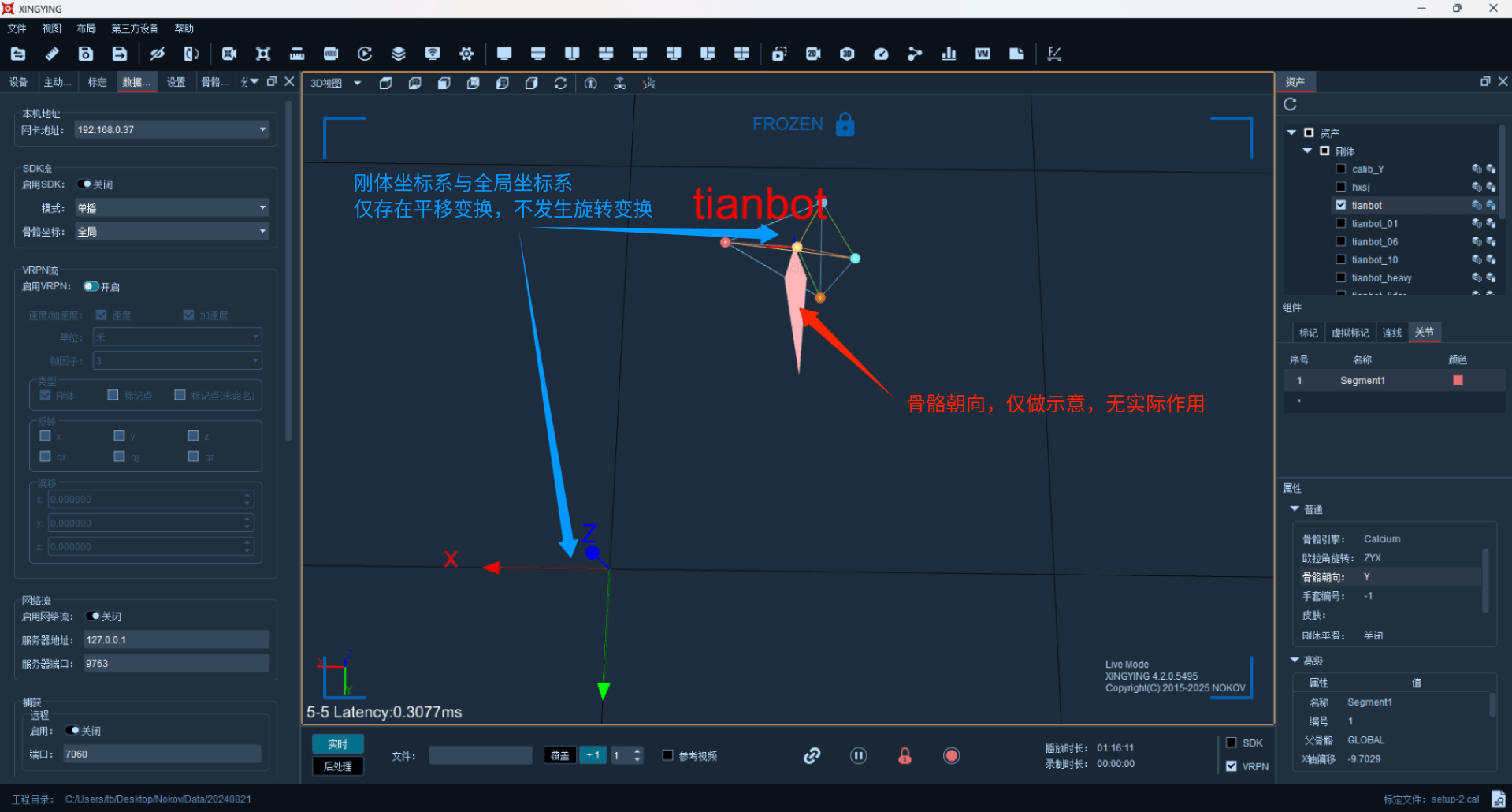
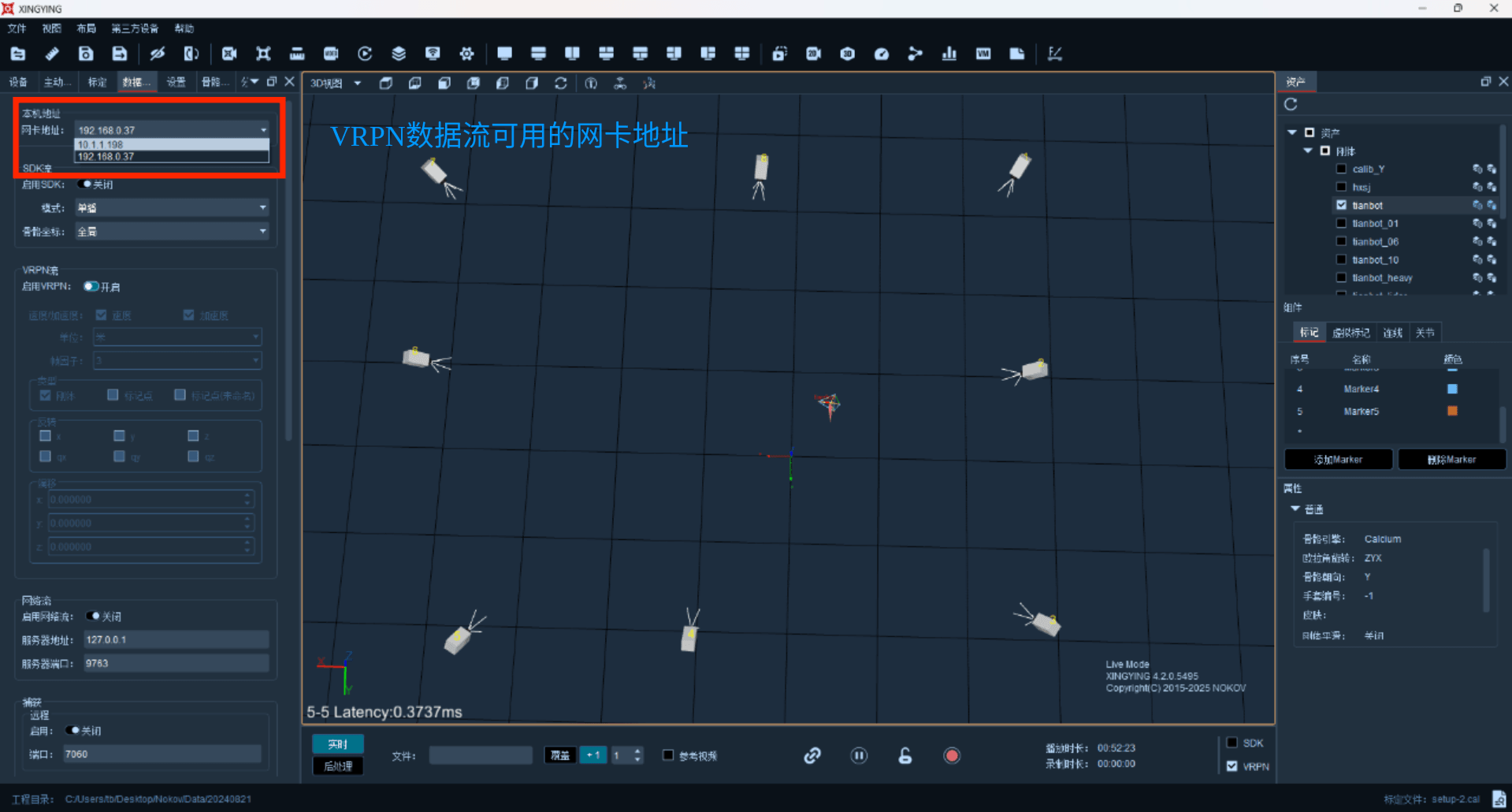
Nokov 动捕 VRPN 流设置
选择可用的网卡地址
此处选择 192.168.0.37 需要与我们后续运行的 ROS_MASTER 主节点设备的 IP 地址保证在同一个网段中
VRPN 数据流设置
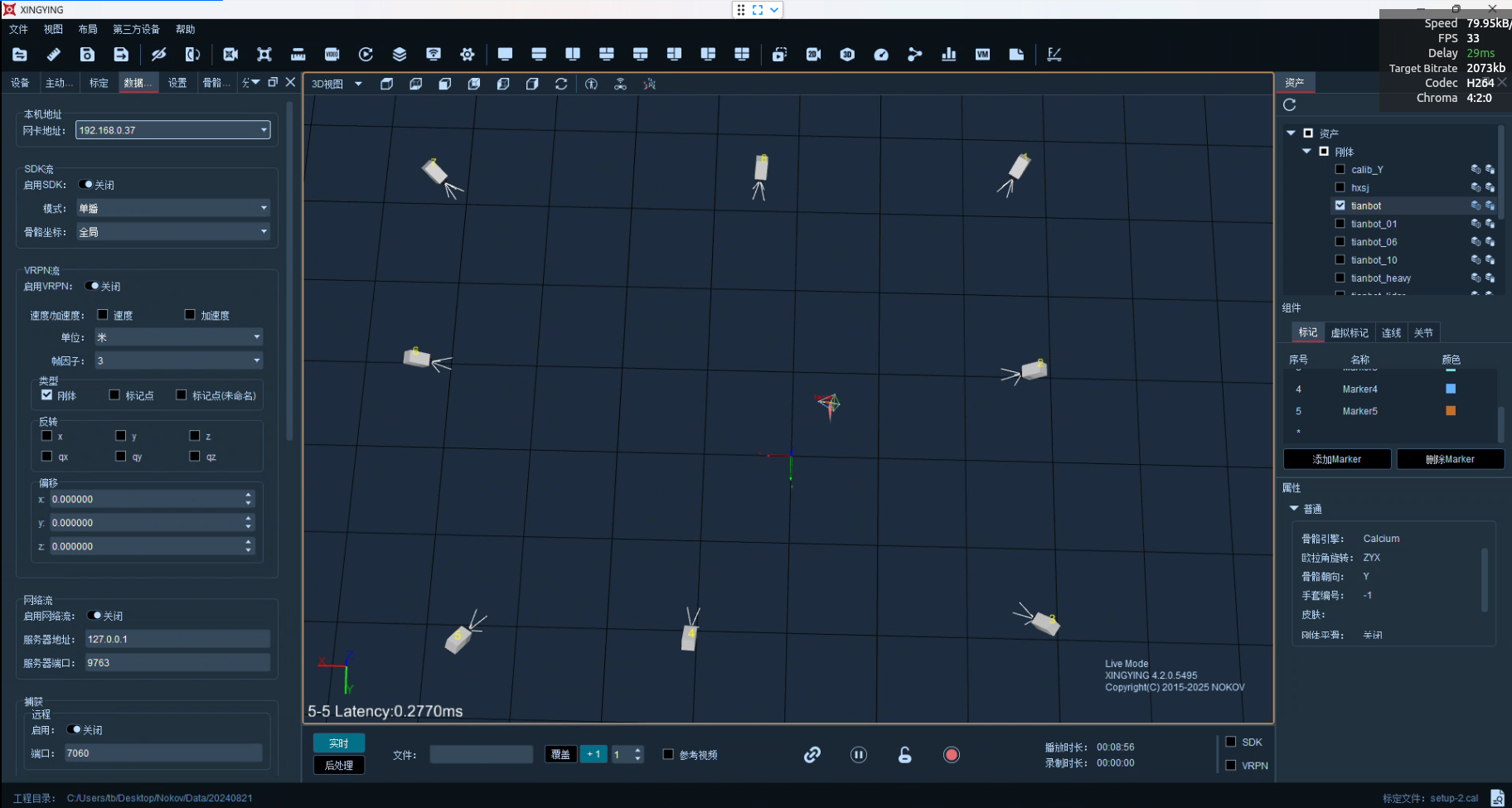
VRPN 数据流的单位
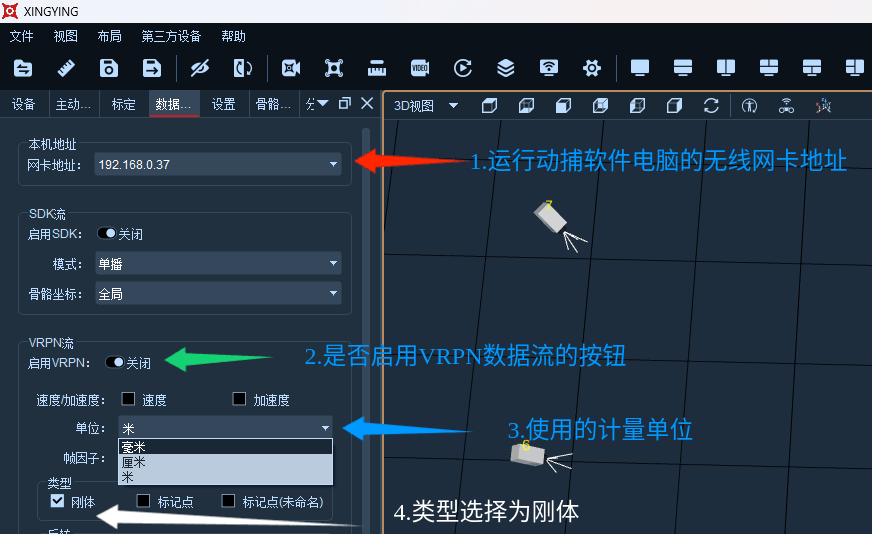
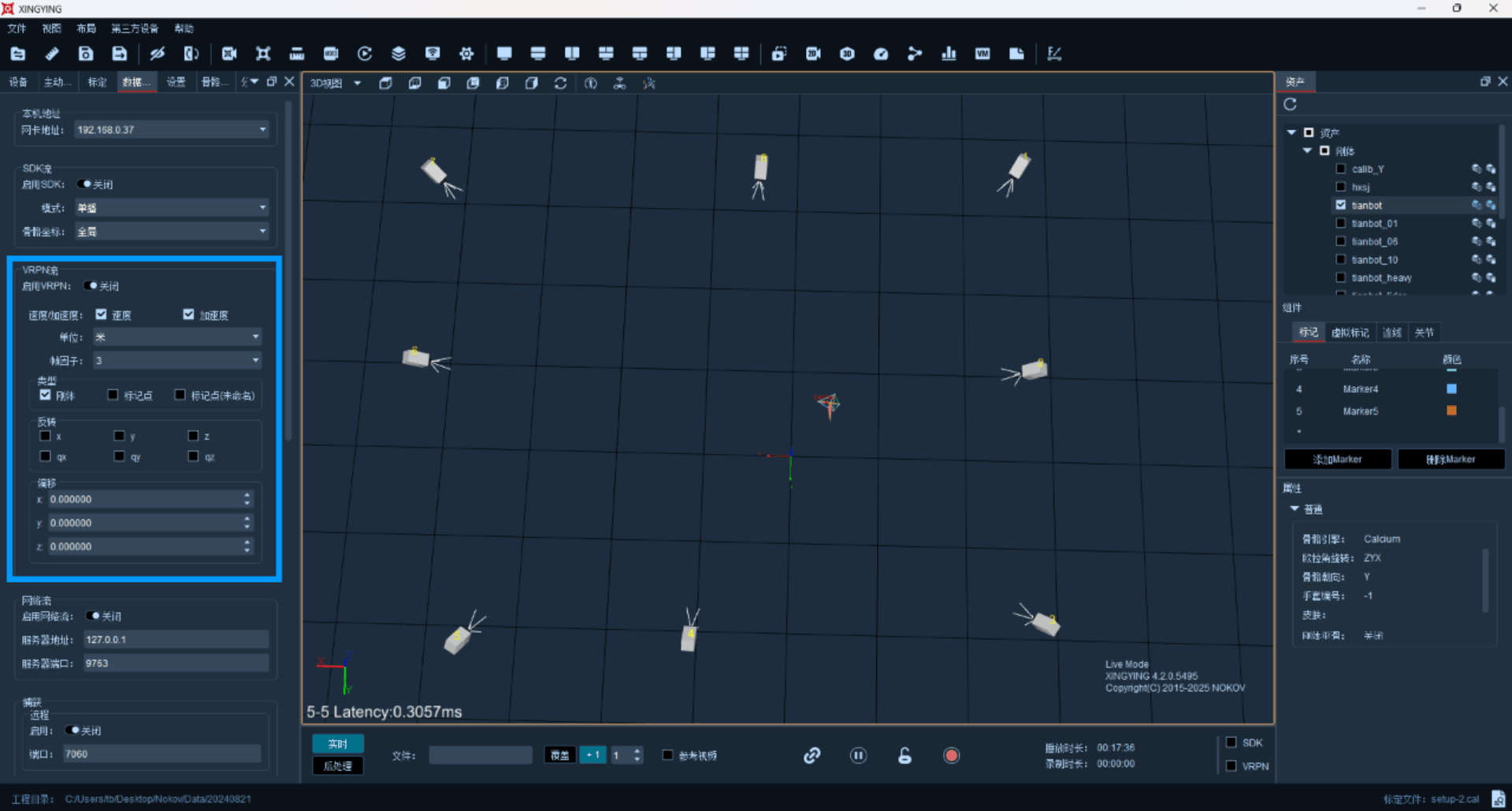
Nokov 动捕还支持一些比较好用的功能,使用时只需要在开启 VRPN 流发布前,勾选对应选框即可
- VRPN 数据的位置偏移
- VRPN 数据流的反转
- VRPN 速度与加速度信息
运行 vrpn_client_ros 节点
确保你的 ROS_MASTER 主节点已经启动
bash
roscore安装 vrpn_client_ros
bash
sudo apt update
sudo apt install ros-noetic-vrpn-client-rosNodes and Topics
这里的tianbot就是我们刚才在动捕软件中创建资产的名称,如果有多个资产,就会有多个如下命名风格的话题
vrpn_client_node/tianbot/posevrpn_client_node/tianbot/twistvrpn_client_node/tianbot/accel
bash
roslaunch vrpn_client_ros sample.launch server:=192.168.0.37 # 192.168.0.37需要与我们在动捕软件中设定的网卡保持一致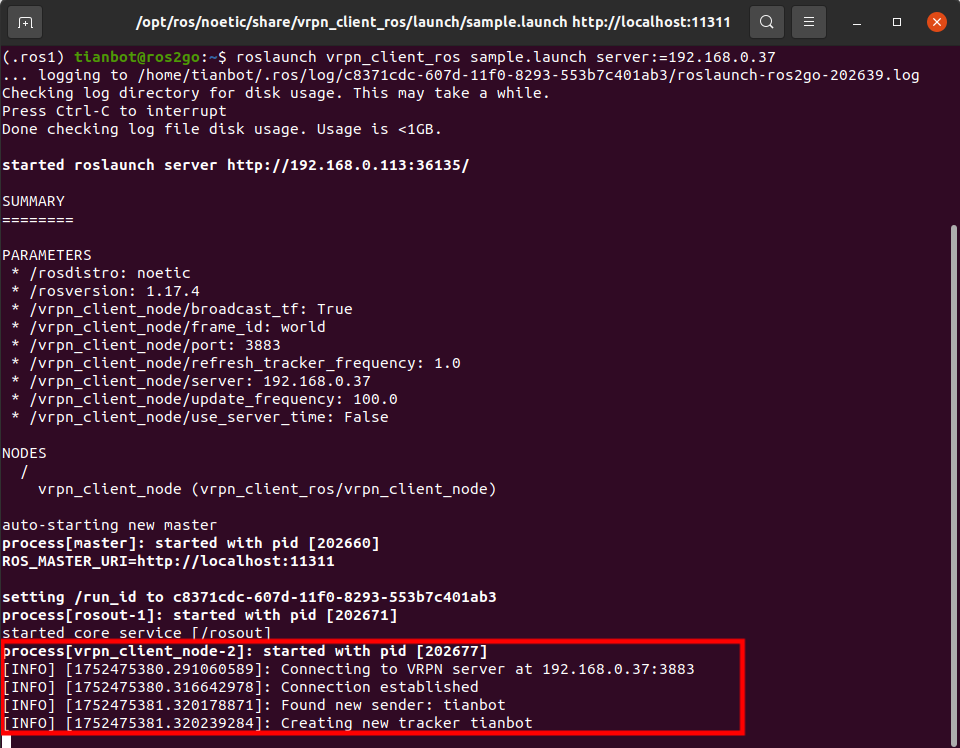
bash
rostopic list # 查看话题列表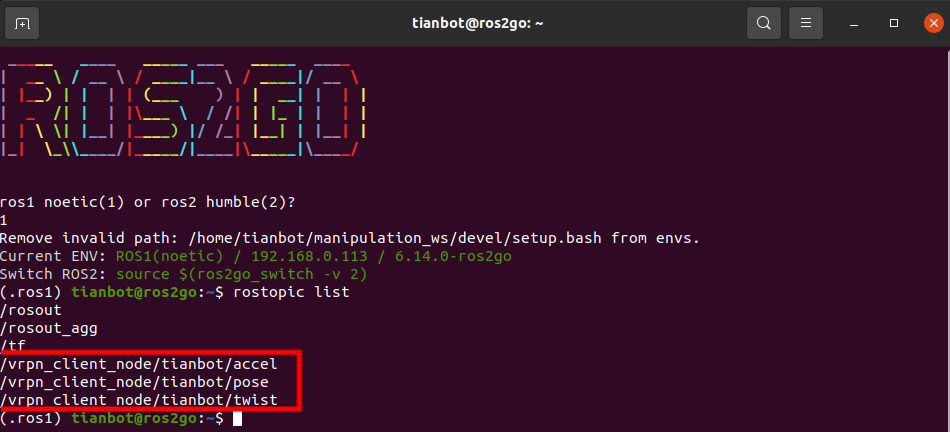
- /vrpn_client_node/tianbot/pose
bash
rostopic echo /vrpn_client_node/tianbot/pose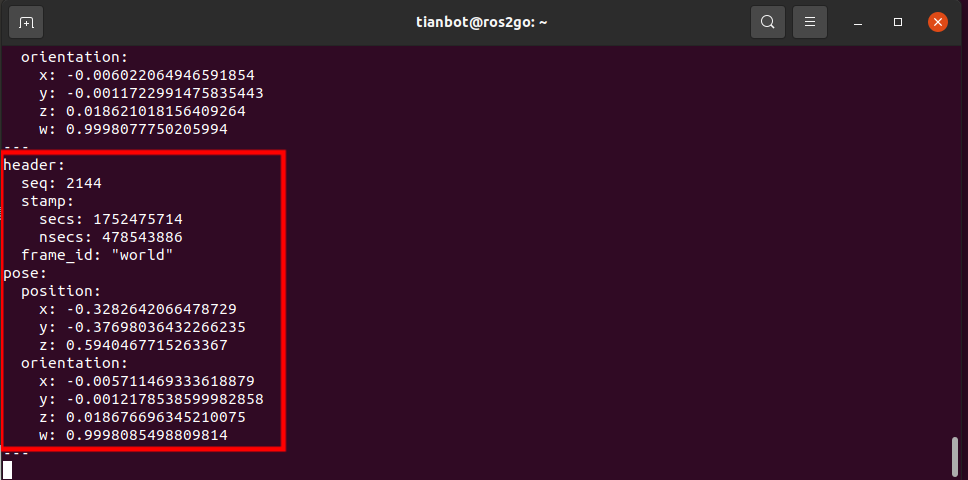
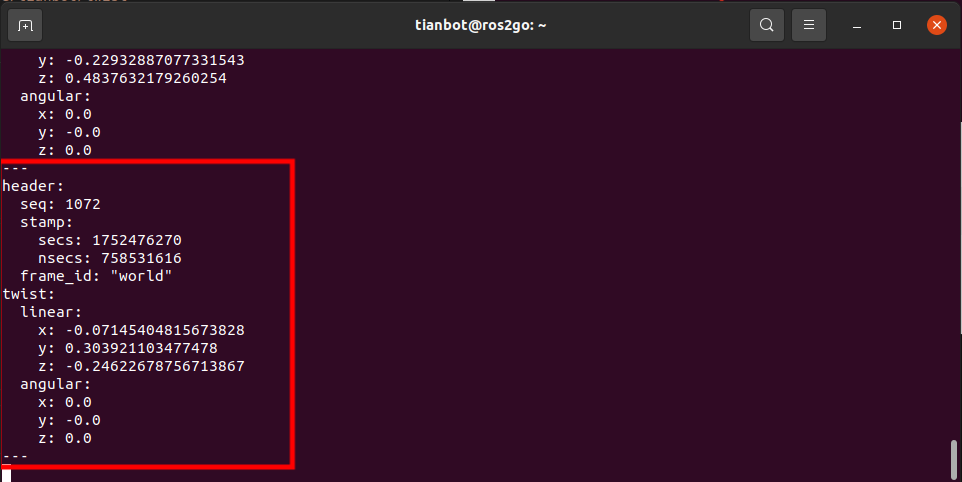
- /vrpn_client_node/tianbot/twist
bash
rostopic echo /vrpn_client_node/tianbot/twist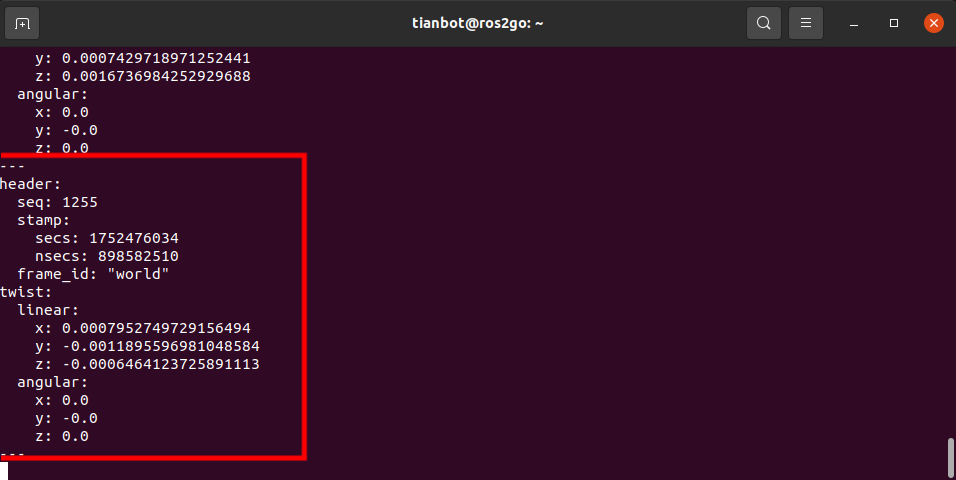
- /vrpn_client_node/tianbot/accel
bash
rostopic echo /vrpn_client_node/tianbot/accel