实验五 激光SLAM建图
【实验目标】
- 实现激光雷达建图功能
- 实现三种建图算法的使用,对比建图效果
- 了解激光雷达消息结构
【实验内容】
GMapping建图
启动tianbot_gmapping节点,用GMapping进行建图,并保存地图
1、启动底盘
先SSH远程连接
小车终端:
shell
roslaunch tianbot_bringup tianbot_bringup.launch2、打开Rviz观察地图
个人PC终端:
shell
roslaunch tianbot_rviz view_mapping.launch注意!!! 启动rviz、rqt等图形化界面,建议在个人PC端启动,也就是在计算机名为ros2go的终端
3、使用GMpping建图
小车终端:
shell
roslaunch tianbot_slam tianbot_gmapping.launch4、使用遥控器控制小车运动建图5、地图尽量封闭后,保存地图
shell
roslaunch tianbot_slam map_save.launch map_file:=gmapping(自定义地图名称)地图默认保存在tianbot_slam/maps/目录下 gmapping建图效果

Cartographer建图
启动tianbot_cartographer节点,用Cartographer进行建图,并保存地图
shell
roslaunch tianbot_slam tianbot_cartographer.launchcartographer建图效果如下: 
Hector_Slam建图
启动tianbot_hector节点,用Hector_Slam进行建图,并保存地图
shell
roslaunch tianbot_slam tianbot_hector.launchhector_slam建图效果如下: 
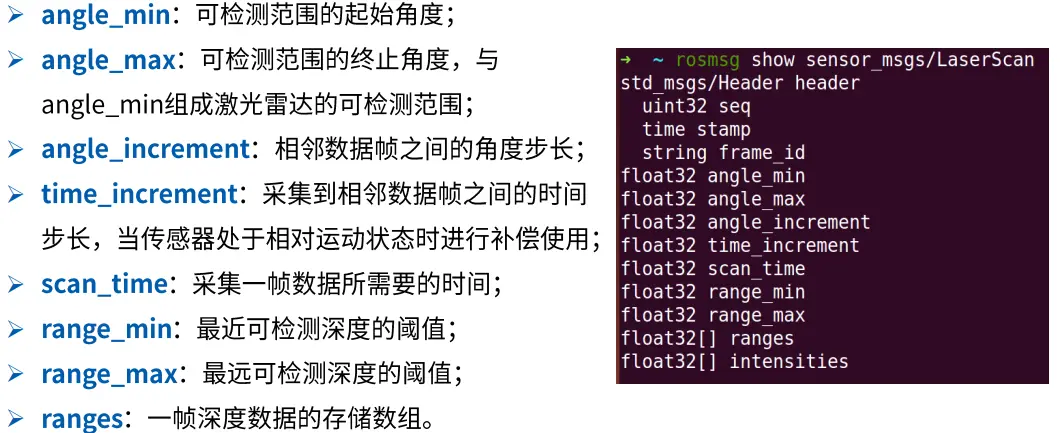
激光雷达消息结构