如何恢复
资源下载
重要
以下资源用于系统恢复/升级,请根据需要下载
| 资源 | 用途 | 下载链接 |
|---|---|---|
| OTA 演示视频 + 系统镜像 | 系统全量升级所需镜像 | 百度网盘 |
| ROS2GO 系统恢复工具.ova | VirtualBox 虚拟机恢复工具 | 百度网盘 |
下载提示
使用 百度网盘客户端 下载,如需加速可在拼多多搜索 百度网盘会员1天
系统恢复介绍
ROS2GO 支持三个级别的恢复功能:
| 恢复方式 | 适用场景 | 数据影响 |
|---|---|---|
A. 用户级增量备份 Timeshift | 恢复到之前的快照状态 | 恢复到快照时的状态 |
B. 系统级原厂快照 ros2go_recovery | 系统无法启动,恢复出厂 | 清除所有用户数据 |
C. 文件系统级全量 OTA | 升级到最新系统版本 | 清除所有用户数据 |
了解更多背景知识
早期 ROS2GO 支持 USB HDD 和 Live CD 两种运行模式。Live CD 模式下根分区文件系统不可修改,好处是这种模式系统怎么都玩不坏,但缺点就是系统重启后所有改动都会丢失;而 USB HDD 模式与一般 OS 无异,所有操作都会保留,但是不慎误操作搞坏文件系统,想要恢复就只能联系我们寄回重置。
后来我们去掉 Live CD 模式,新增了 Puppy Rescue OS 独立恢复系统,可以理解为类 Windows PE 系统。在独立恢复系统内我们构建了自助恢复工具ros2go_recovery,如果遇到误操作系统无法正常启动,可以键入少量命令调起ros2go_recovery工具即可将 ROS2GO 系统还原至出厂状态。
最近的 ROS2GO 系统中我们进一步增强了系统恢复能力,在原来ros2go_recovery基础之上,新增了自动增量备份功能,用户可以通过Timeshift软件自助控制备份还原策略。
除此之外我们还增加了系统全量 OTA 功能,用户可以在 Puppy Rescue OS 独立恢复系统下,升级 ROS2GO 到我们发布的任意系统。仅需下载我们定时发布的系统镜像,放置到指定位置然后执行恢复操作即可。
恢复步骤
注意
请注意在使用系统恢复会抹除所有文件,在尝试恢复之前请确保重要文件已经备份,恢复是基于文件系统恢复,如果删除或者损坏了文件系统,如:格式化分区、rm-rf 等破坏彻底的,则该恢复模式无法适用。
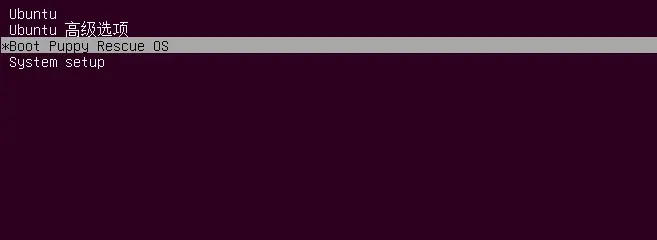
启动时选择 Boot Puppy Rescue OS
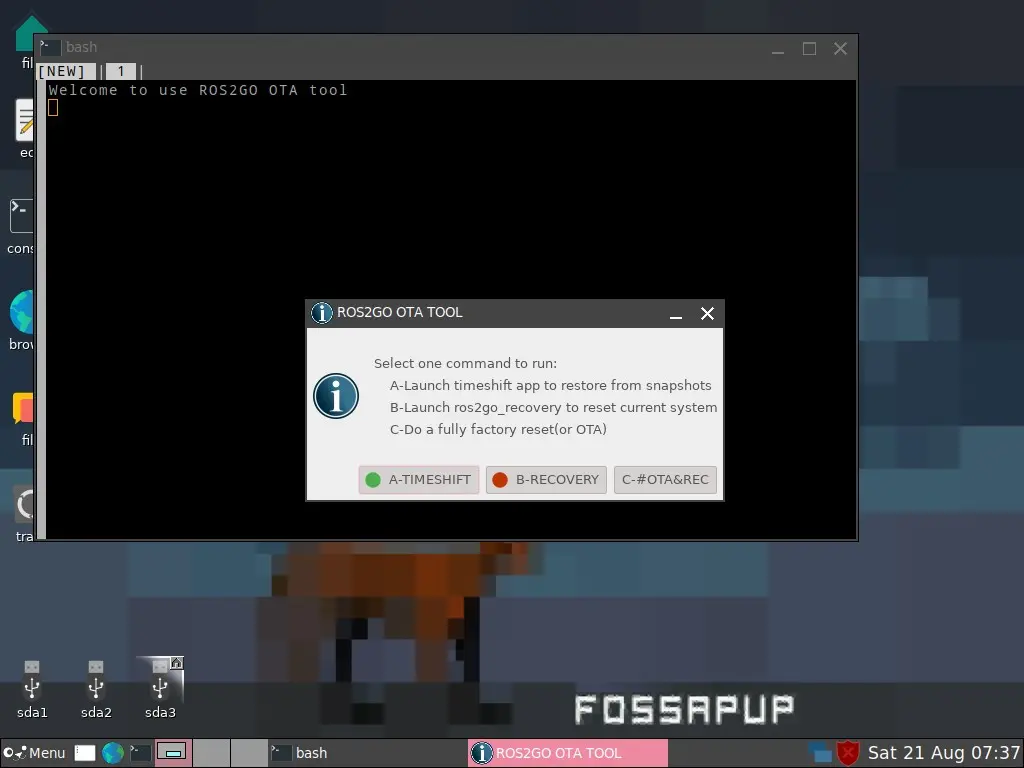
恢复方式选择
A 用户级增量备份恢复
Timeshift:可以选择需要恢复的快照,具体操作参考B 系统级原厂快照恢复
ros2go_recovery:恢复出厂模式,使用鼠标点击B-RECOVERY选项即可。C 文件系统级全量
OTA:用于系统升级,具体步骤
针对各自遇到的情况选择恢复方式即可快速进行恢复,关于恢复相关技术支持可以在技术支持群进行咨询。
从 VirtualBox 启动
有问题再尝试
上面方法进不去恢复系统,再尝试这个办法
Puppy Rescue OS 独立恢复系统内核比较旧,某些电脑比较新,可能会进不了这个恢复系统,如果遇到这种情况,切换到 Windows 后在 Virtual box 虚拟机下操作,虚拟机操作步骤如下:
提示
Virtual Box 一定注意要安装官网最新版本:https://www.virtualbox.org
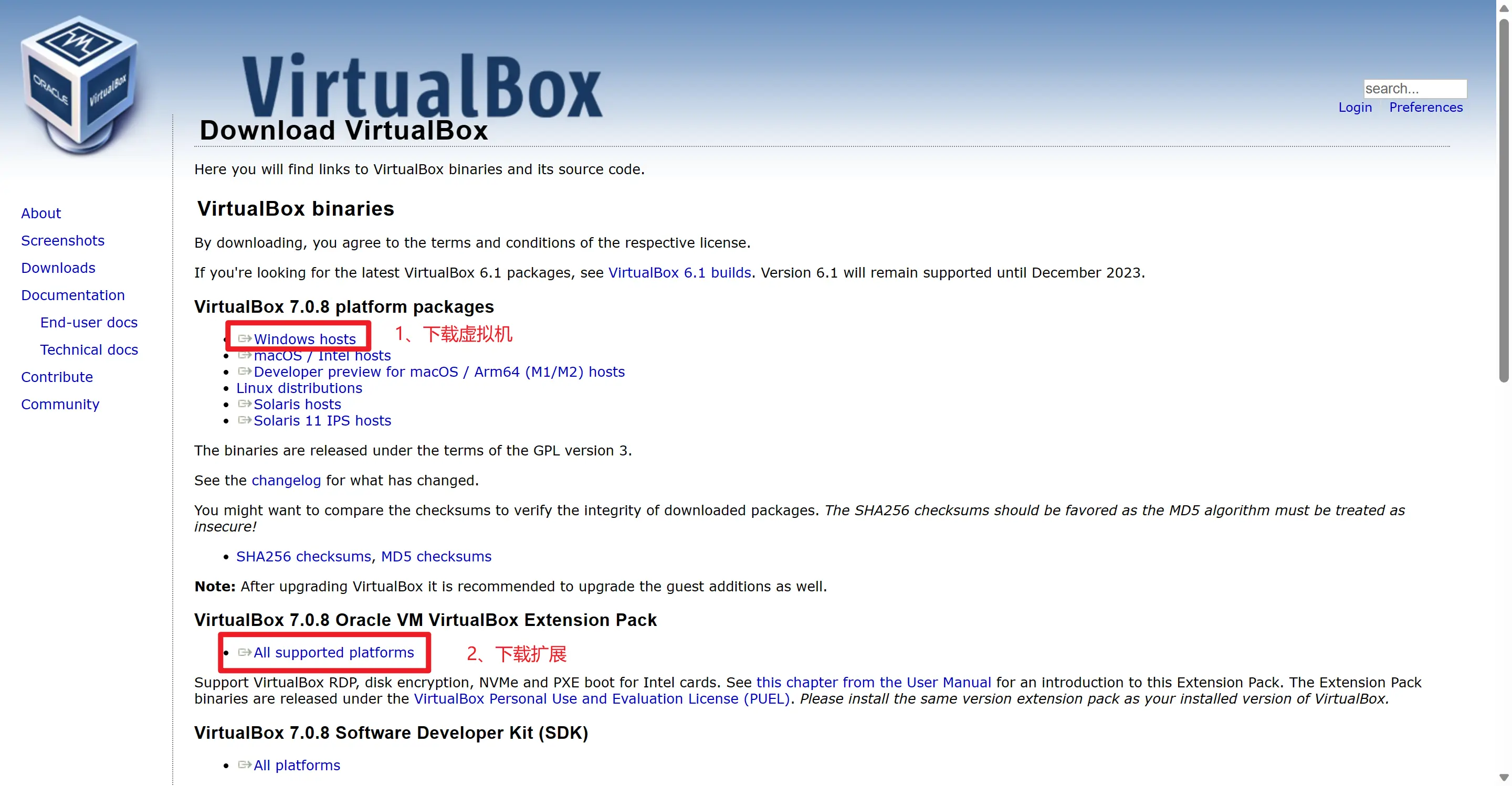
- 下载安装 VirtualBox 及下述中的几个文件
从这里下载并安装 VirtualBox 以及 VirtualBox Extension Pack
ROS2GO 系统恢复工具
从 资源下载 章节下载 ROS2GO系统恢复工具.ova
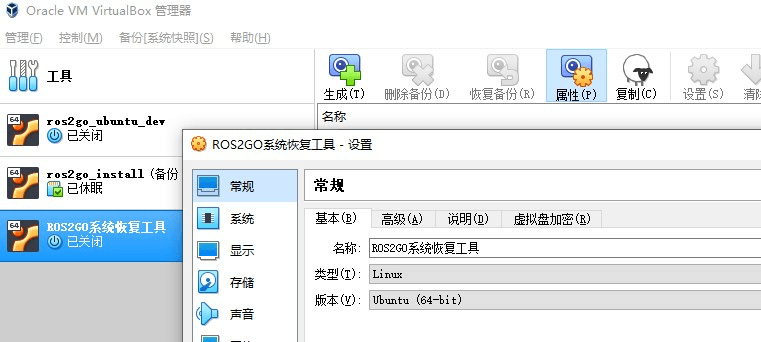
打开 VirtualBox 选择导入,选中下载完成的 ROS2GO系统恢复工具.ova
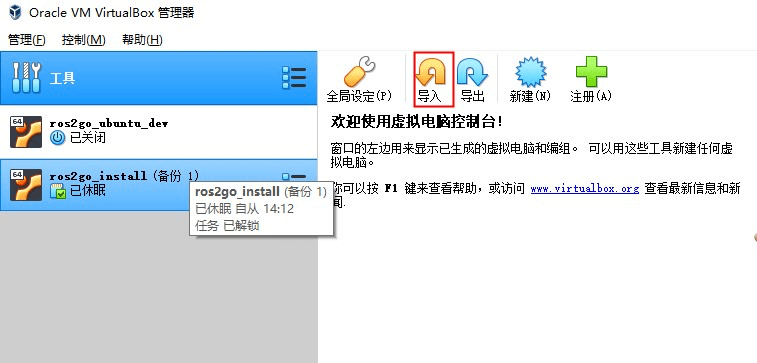
选中 ROS2GO 系统恢复工具,点击设置
USB 设备,添加 ROS2GO
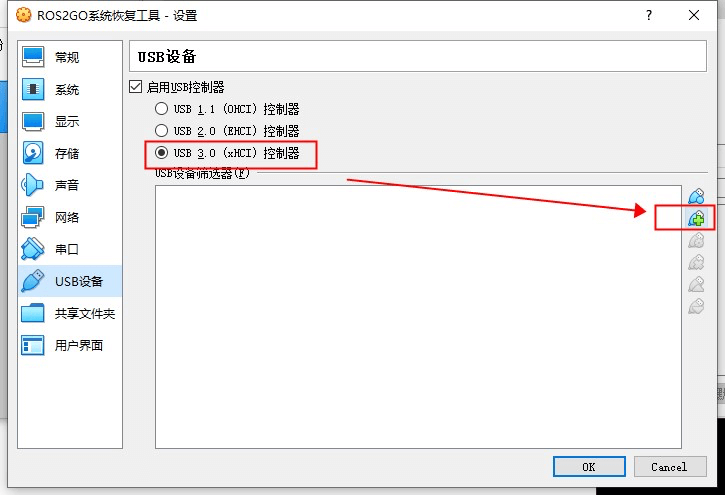
添加后类似如图效果

启动虚拟机
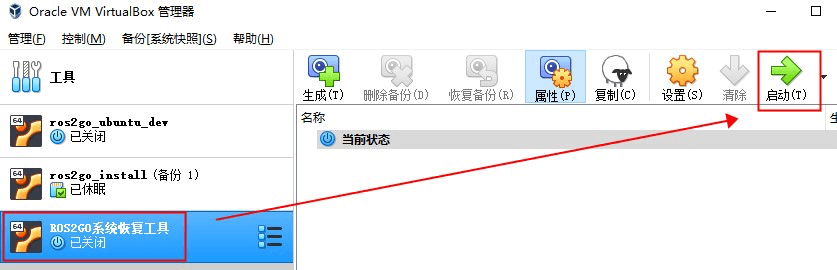
点击启动后,等待显示如下画面


点击启动后,等待显示如下画面 
此时,按下回车键,根据提示选择 Puppy Rescue OS 系统即可
进入 Puppy Rescue OS 独立恢复系统下,根据需要选择对应选项(参考上方恢复方式选择),然后输入 yes,等待进度条走完后重启电脑即可。
