使用 Matlab 开发 TOM 系列
软件版本
版本
MATLAB 2024a,支持 Python 3.9, 3.10, 3.11 https://ww2.mathworks.cn/support/requirements/python-compatibility.html
ROS Toolbox 支持 ROS Noetic 和 ROS2 Humble,但是仅支持 Python 3.8, 3.9 和 3.10
建议安装 Python 3.10 版本。若系统仅安装 Python 3.11 会导致 rosinit 创建虚拟环境失败,需要单独安装 Python 3.10 并且在 MATLAB ROS Toolbox Preferences 中重新创建 Python 环境。
常用 MATLAB 模块
- Simulink
- Computer Vision Toolbox
- Image Acquisition Toolbox
- Image Processing Toolbox
- Robotics and Autonomous Systems
- ROS Toolbox
- Navigation Toolbox
- Lidar Toolbox
- AI, Data Science, and Statistics
- Deep Learning Toolbox
与 ROS 连接
参考
MATLAB 官方文档Connect to a ROS Network
我们可以使用 MATLAB 连接到 ROS 网络,以便在 MATLAB 中访问 ROS 消息、服务和参数,对 TOM06S 底盘进行控制。ROS Master 运行在 TOM06S 底盘上,我们在 MATLAB 中采用连接到外部 ROS Master的方式。
连接 ROS_MASTER
运行如下命令
setenv('ROS_MASTER_URI','http://10.168.1.200:11311')
setenv('ROS_IP','10.168.1.115') # WINDOWS 使用ipconfig查看本机ip
rosinit输出结果
Trial License -- for use to evaluate programs for possible purchase as an end-user only.
>> setenv('ROS_MASTER_URI','http://10.168.1.200:11311')
>> setenv('ROS_IP','10.168.1.115')
>> rosinit
The value of the ROS_MASTER_URI environment variable, http://10.168.1.200:11311, will be used to connect to the ROS master.
The value of the ROS_IP environment variable, 10.168.1.115, will be used to set the advertised address for the ROS node.
Initializing global node /matlab_global_node_15275 with NodeURI http://10.168.1.115:59839/ and MasterURI http://10.168.1.200:11311.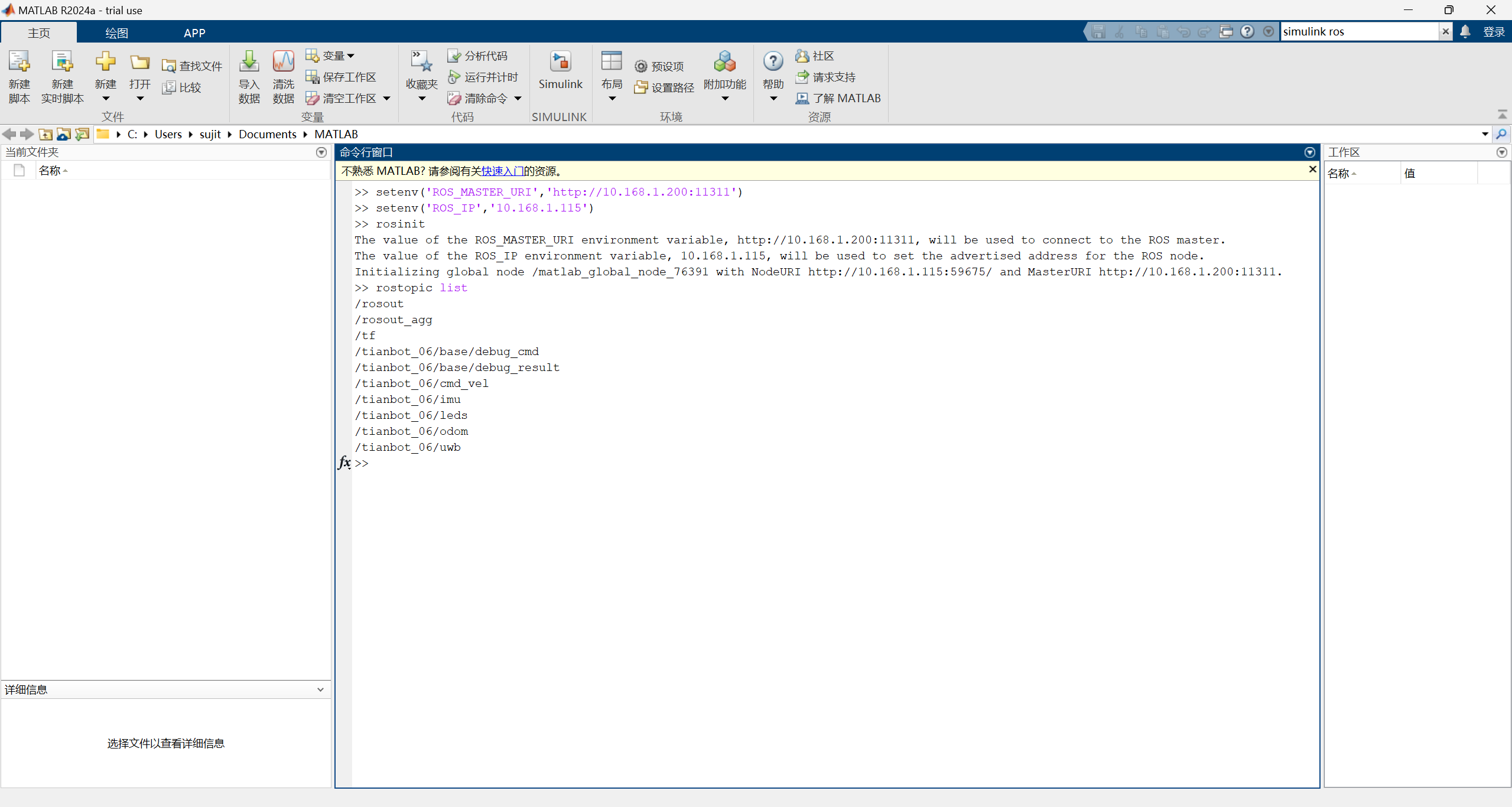
允许公用网络和专用网络访问此应用

参考
这里请参考ROS 多机通信。TOM 的底盘是已经正确配置过的,但是如果出现只能看到话题列表但不能通信等问题请仔细检查 ROS_MASTER_URI 和 ROS_IP 的 IP 配置。
查看话题
如果初始化成功,可以在在 MATLAB 的命令行窗口中输入rostopic list查看当前 ROS Master 上的话题列表。
rostopic list
使用 ROS Data Analyzer 观察传感器数据
首先完成上述与 ROS 建立连接的步骤。
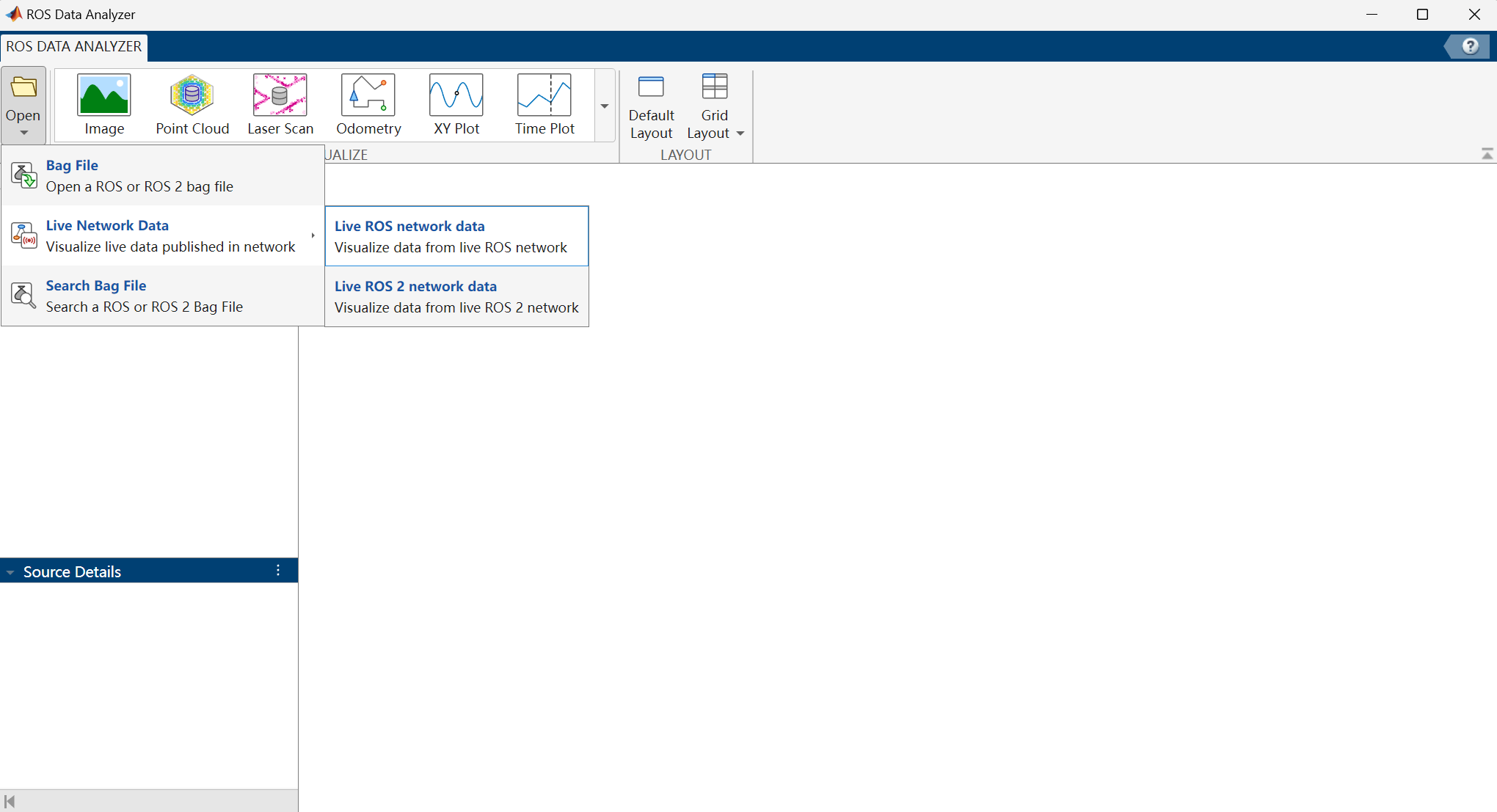
使用 ROS Data Analyzer
- 在 MATLAB 的工具条上的 APP 标签页,找到
ROS Data Analyzer,点击打开。

- 在 ROS Data Analyzer 中,点击 Open,点击 Live Network Data, 选择 Live ROS network data。
在弹出的对话框中输入 ROS Master 的 IP 地址和端口,点击 Submit。
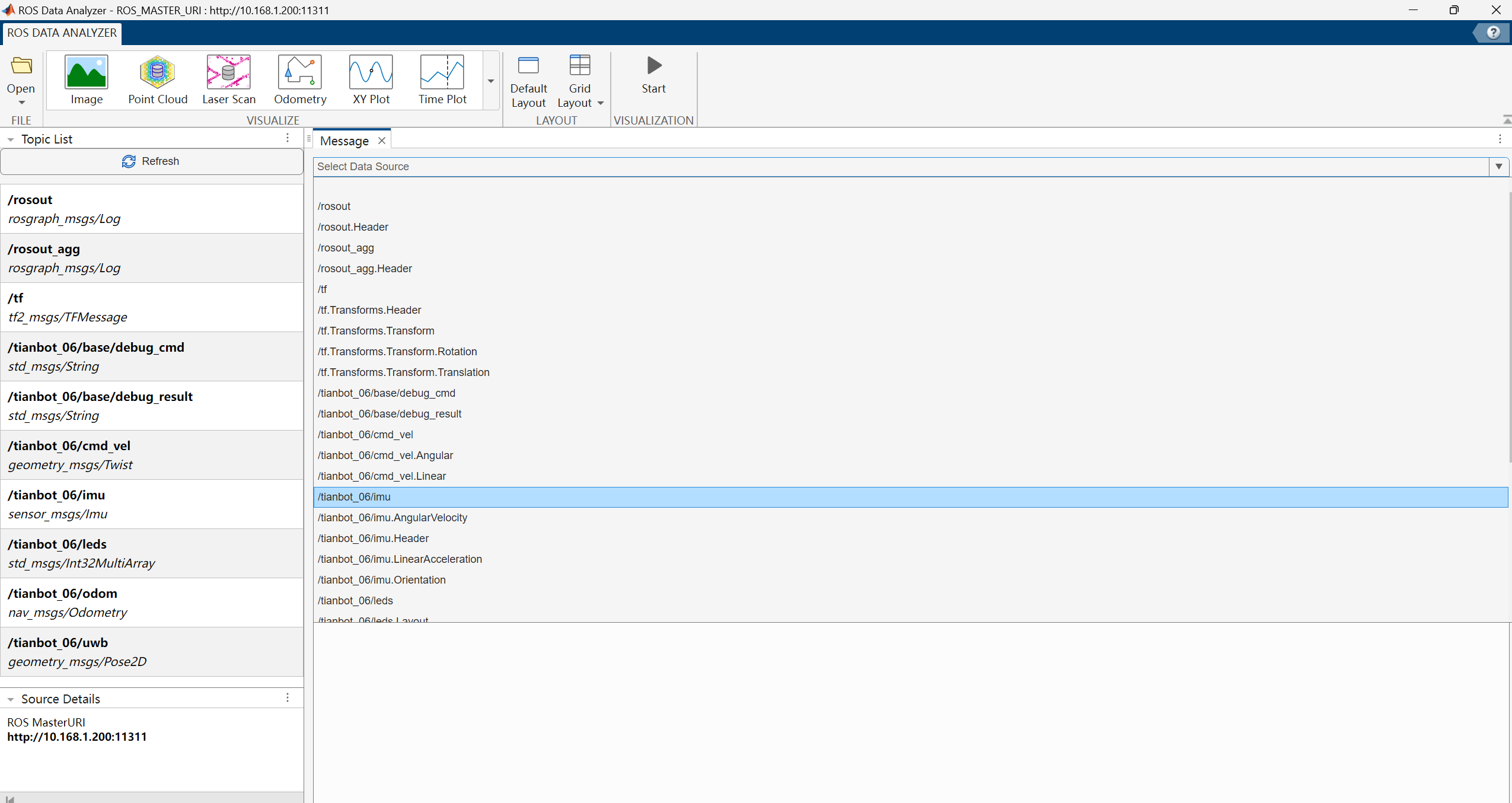
配置完成后,可以看到左侧的Topic list栏的话题,从Source Details的ROS_MASTER_URI

连接成功后,可以在左侧的Topics中看到当前ROS Master上的话题列表。上方Visualizers中可以选择Message。这里我们选择Message,

可以选择一个 IMU 话题,在 Select Data Source 中选择一个tianbot_06/imu话题,点击上方的 Start,
点击 Start,就可以看到点云数据的画面。

可以看到该话题的数据 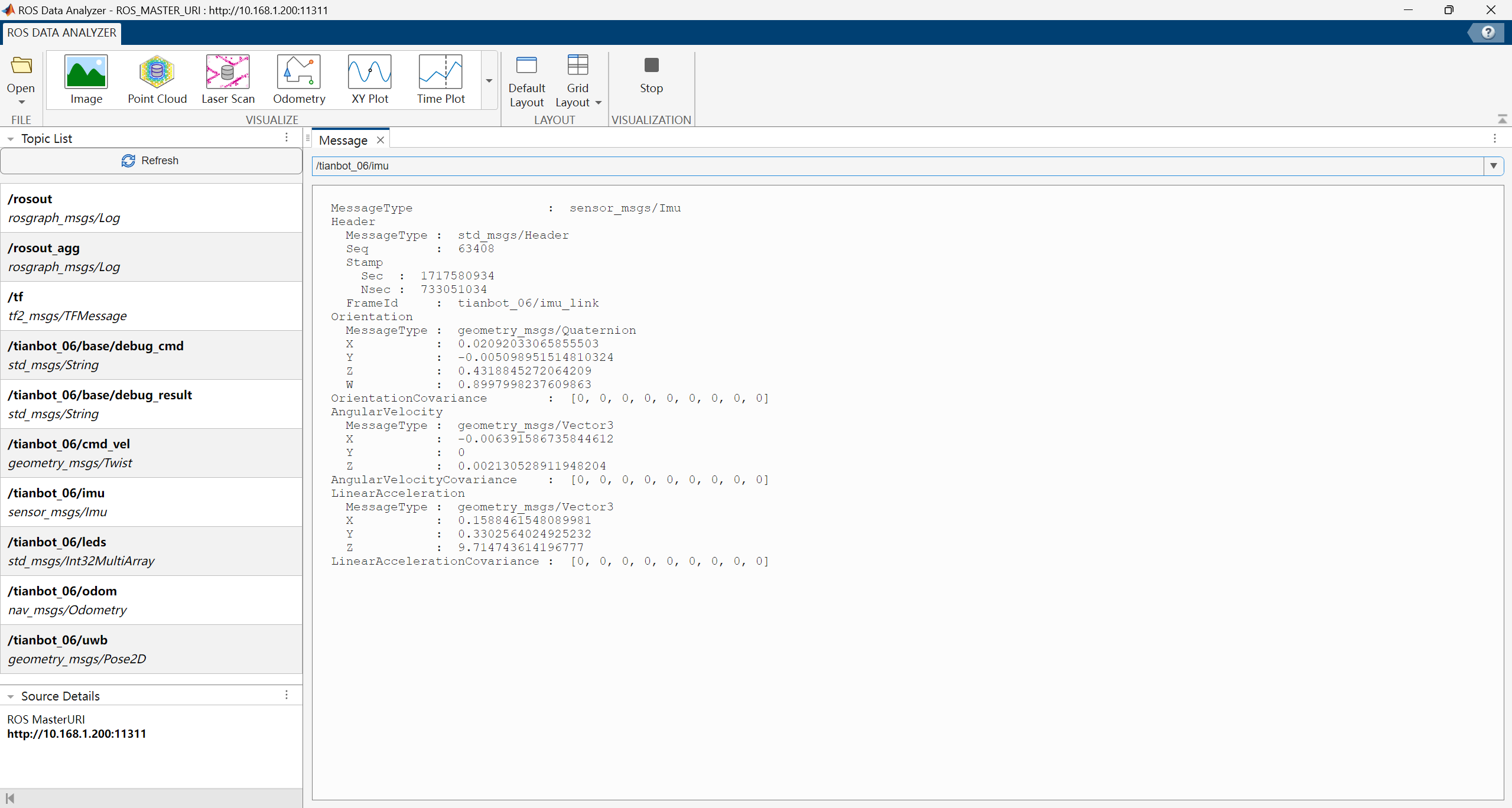
ROS_TOOLBOX
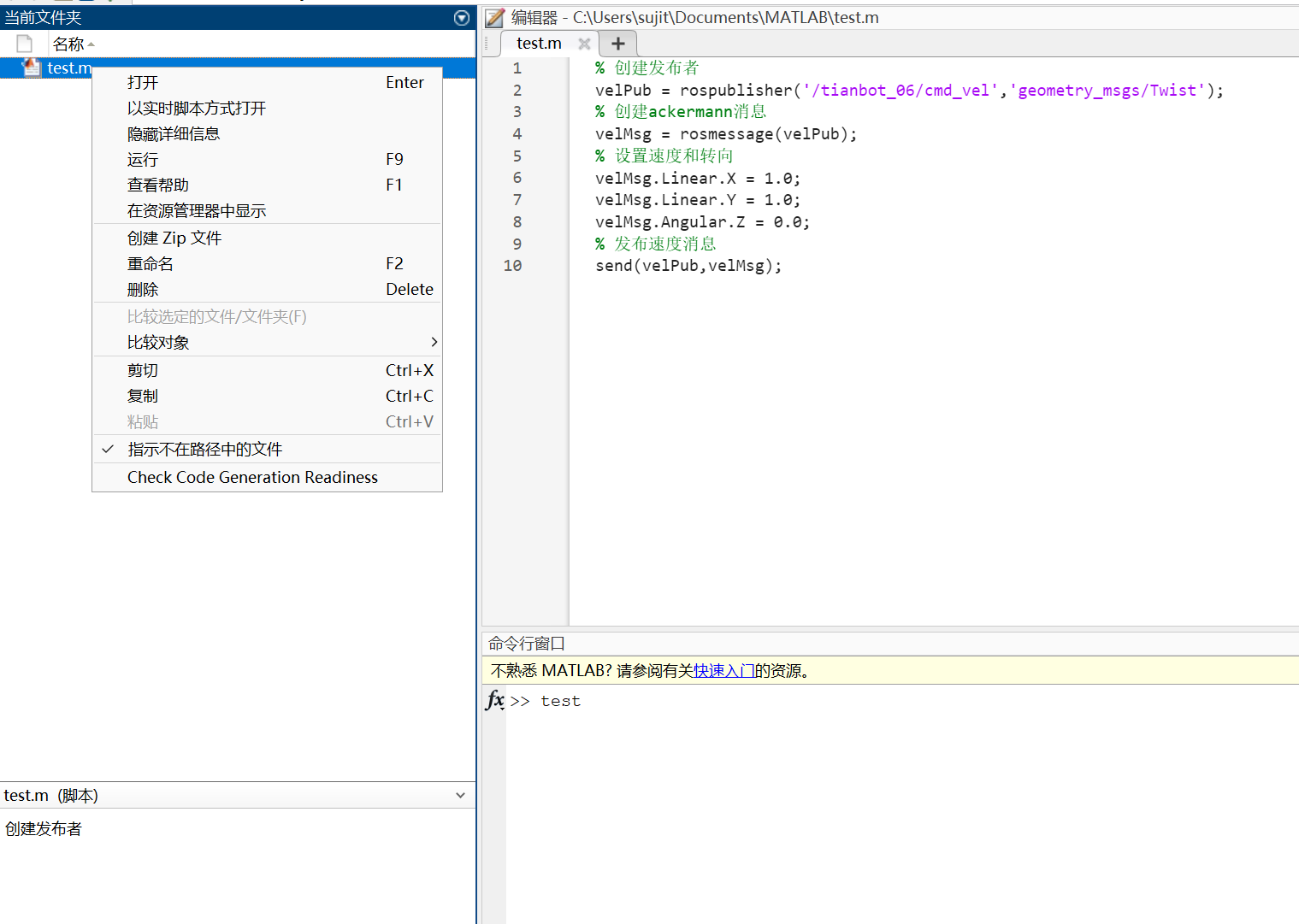
创建测试脚本
为了运行方便,我们可以创建一个.m脚本文件,在当前文件夹栏中空白处右键新建脚本文件

这里我们设置脚本名称为test.m

双击该脚本,并填入如下代码
% 创建发布者,该话题要与接收端话题保持一致
velPub = rospublisher('/tianbot_06/cmd_vel','geometry_msgs/Twist');
% 创建ackermann消息
velMsg = rosmessage(velPub);
% 设置速度和转向
velMsg.Linear.X = 1.0;
velMsg.Linear.Y = 1.0;
velMsg.Angular.Z = 0.0;
% 发布速度消息
send(velPub,velMsg);完成后如下图
注意
如果在 Matlab 中运行上述代码,
- 小车没有动,请检查
Matlab端设置的ROS_MASTER_URI和ROS_IP是否配置正确。 - 在小车端开启新终端运行
rostopic hz /tianbot_06/cmd_vel',显示no new message发现小车端没有收到速度消息,请检查是否正确关闭了 Windows 防火墙。 关闭防火墙后,请在小车端新开一个终端运行roswtf检查节点连通性
执行脚本
- 在命令行窗口输入文件名 test 后回车运行,或者点击运行按钮或快捷键 F5 运行

这样就可以在 MATLAB 中控制 TOM06S 底盘的速度了。这里只发布了一次速度消息,如果需要持续控制,可以使用 MATLAB 的定时器功能,定时发布速度消息。
使用 Simulink 进行底盘控制
Simulink 是 MATLAB 中的重要部分。下面我们展示如何在 Simulink 中控制 TOM 底盘。首先启动 TOM 底盘。
参考
本小节主要参考 MATLAB 官方文档Get Started with ROS in Simulink
打开示例 DEMO
在命令行终端中执行如下命令
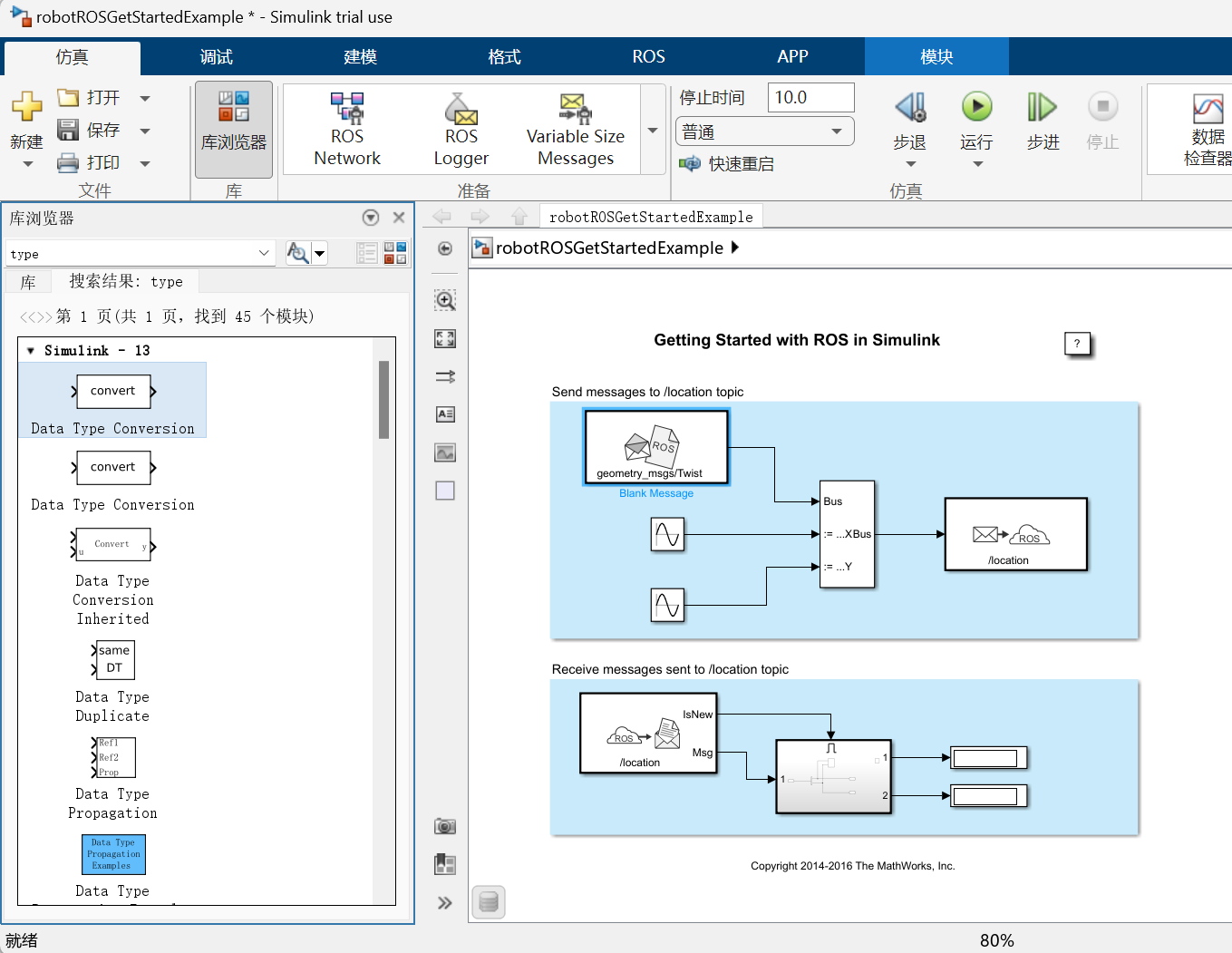
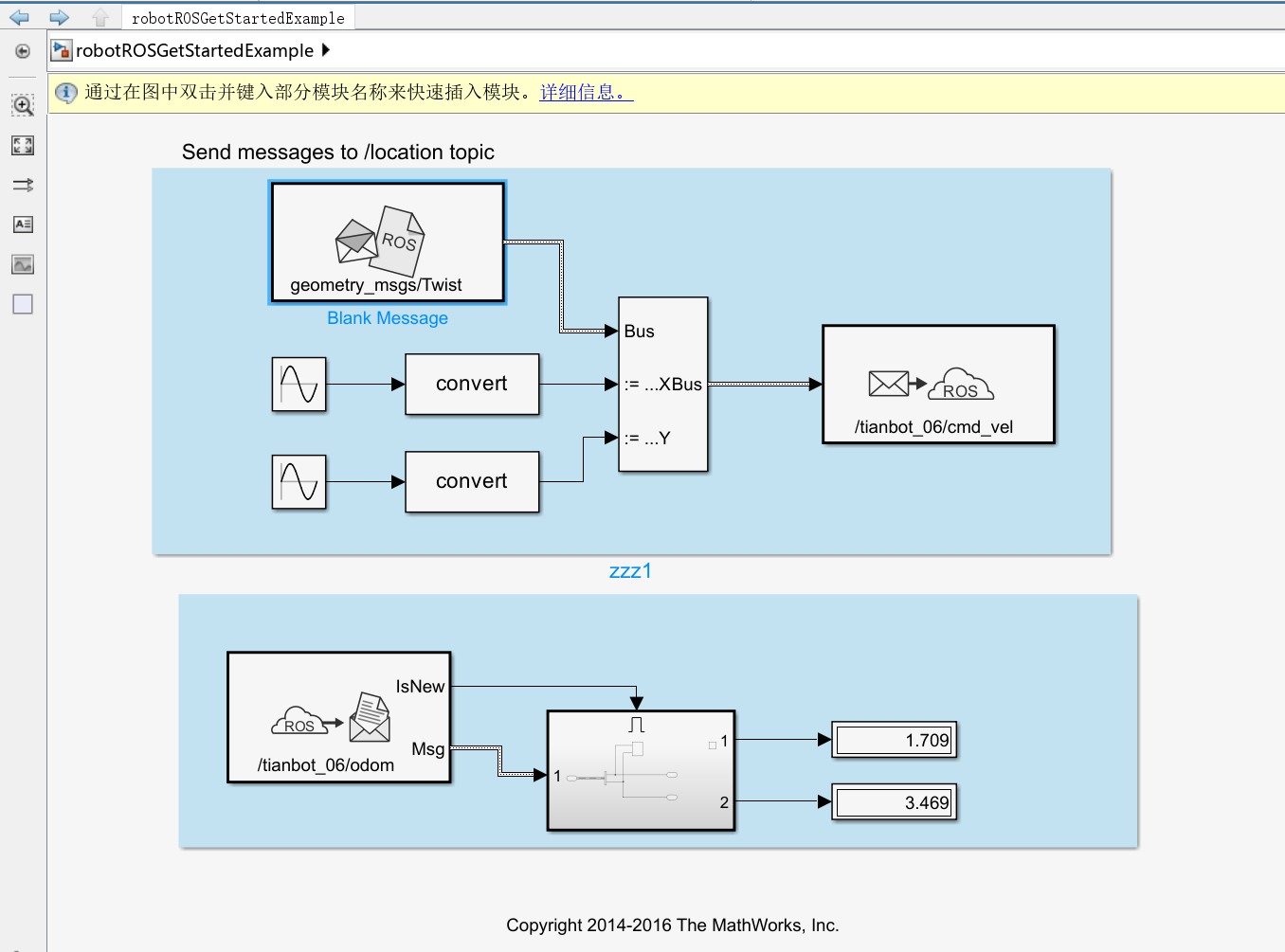
open_system('robotROSGetStartedExample');打开 Simulink 模型,这是一个简单的 ROS 示例模型,包含了一个订阅速度消息的订阅者和一个发布速度消息的发布者。我们可以在这个模型的基础上修改,实现底盘的控制。模型如下图所示。
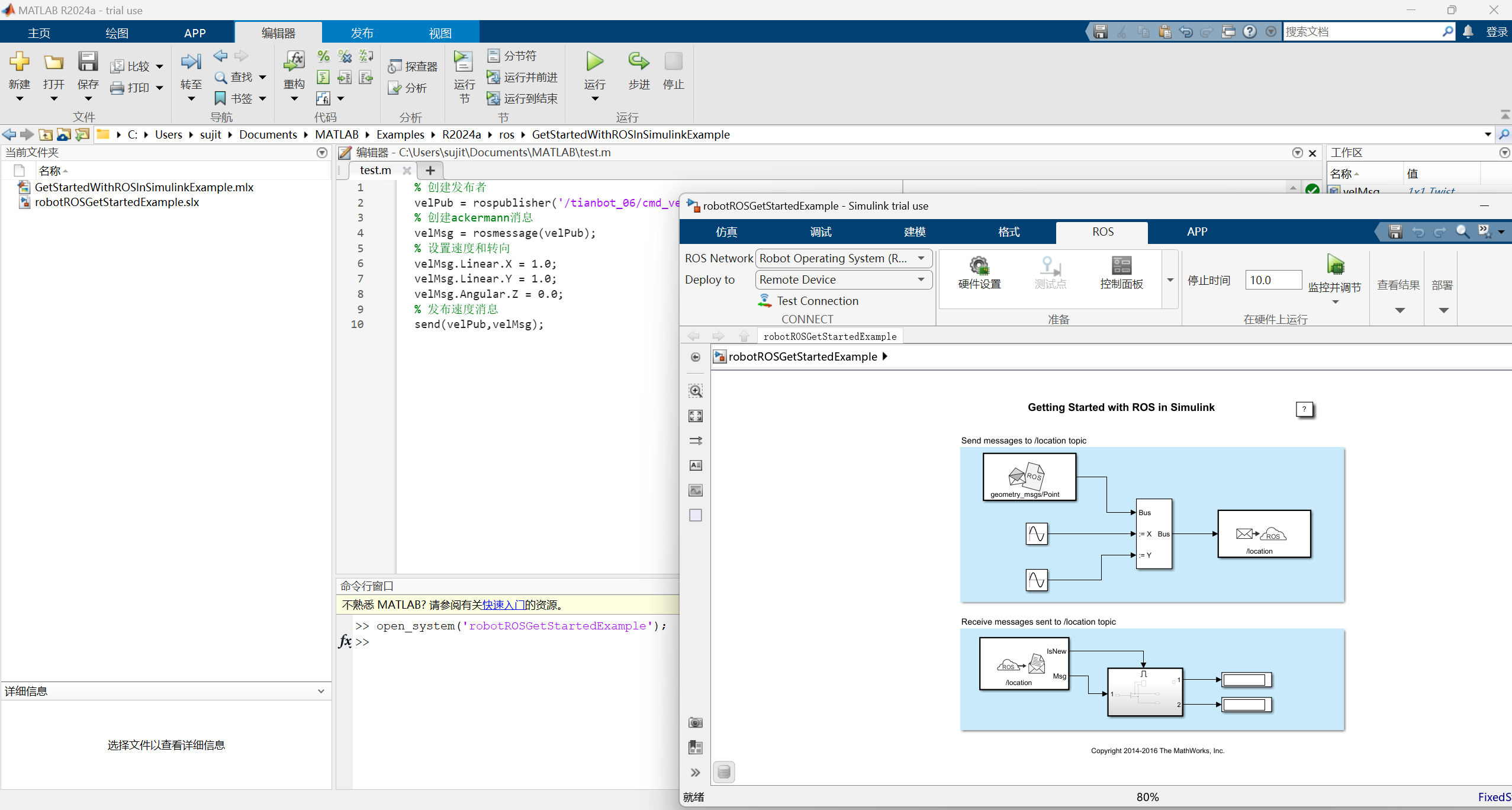
配置 ROS 网络
在 Simulink 的窗口中,找到仿真标签,然后点击 ROS Network,对 ROS 网络进行配置。TOM06S 底盘 ROS Master 的 IP 地址为10.168.1.200,端口为11311,运行 MATLAB 的电脑 IP 地址为10.168.1.115。配置完成后可以先Test测试,然后确定。

此处,我们向 Tianbot 的/tianbot_06/cmd_vel话题发送控制指令,订阅/tianbot_06/odom话题。首先,因为我们是和真实的 Tianbot 底盘调试,需要将调试的仿真速度调整为真实的 1 秒钟。这里我们使用仿真调速的方式。在 Simulink 的窗口中,找到调试标签,然后点击运行的下拉按钮,在仿真调速中勾选启用调速以减慢仿真。如下图所示。停止时间设置为 20s。

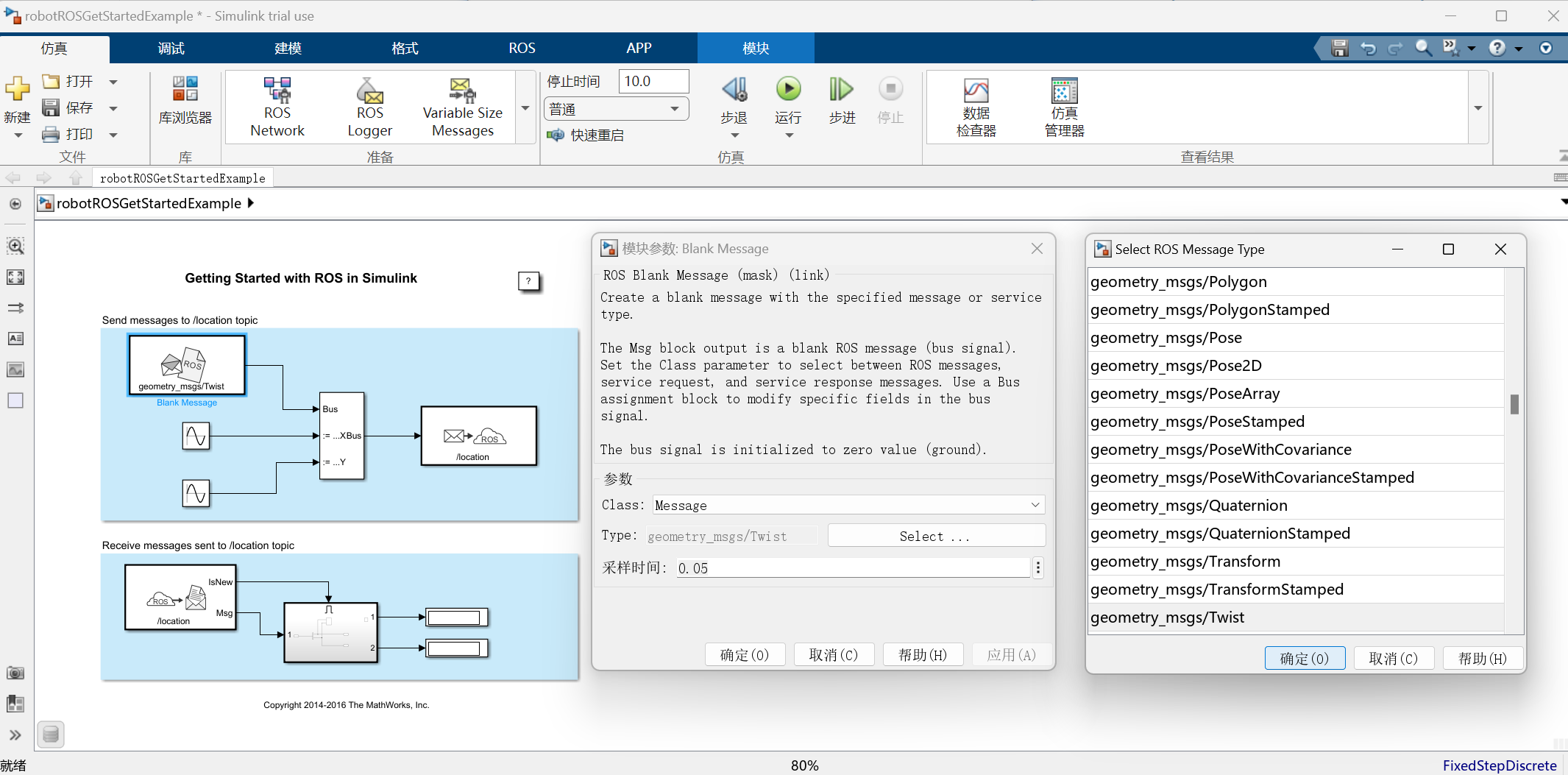
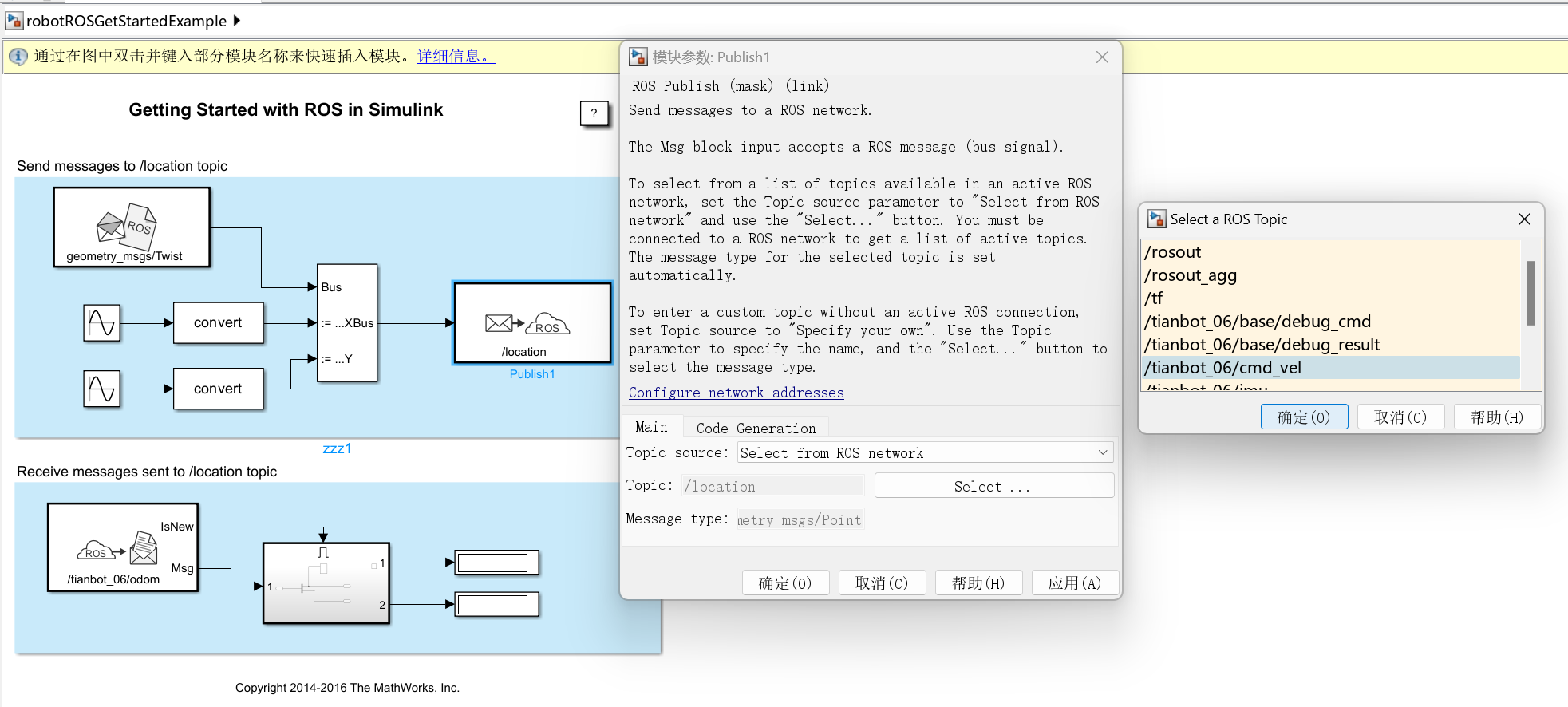
下面我们双击模型中 send message 部分的Blank Message模块,点击Select,选择geometry_msgs/Twist,然后点击确定。这样就可以向 Tianbot 底盘发送速度控制指令了。这里我们将采样时间设置为 inf,即可。
消息发布模块类型转换
在库浏览器中添加类型转换
运行时发现 Bus Selector 中的数据类型不匹配,增加两个 type conversion 模块,将 Sine Wave 输出的 Double 转换为 Single 即可

添加后

然后修改消息发布模块,逐层点击应用,确定,即可完成设置
然后点击运行进行测试
可能的报错
如果在 F5 运行遇到问题

这里我们将采样时间设置为 inf,再次运行即可。

消息订阅模块配置
消息发布模块完成后,我们继续设置消息订阅模块。双击模型中的Subscribe1模块,选择/tianbot_06/odom话题,修改 Topic 源为从 select from ROS Network,然后选择 odom 话题
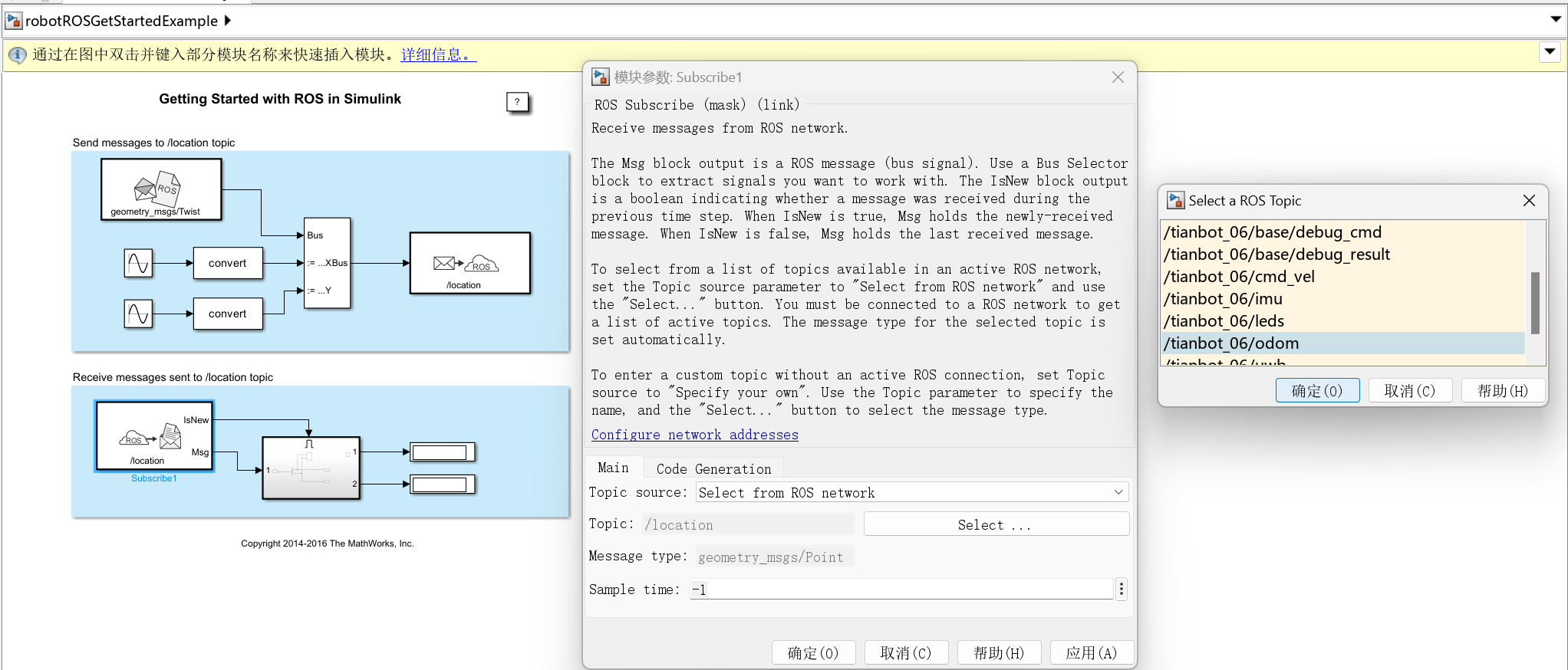
这里的Sample Time设置为 0.02,因为 TOM 底盘的 Odom 发布速度为 50hz,然后点击确定。

修改完成后,点击应用后,再点击确定,设置完成

效果如下

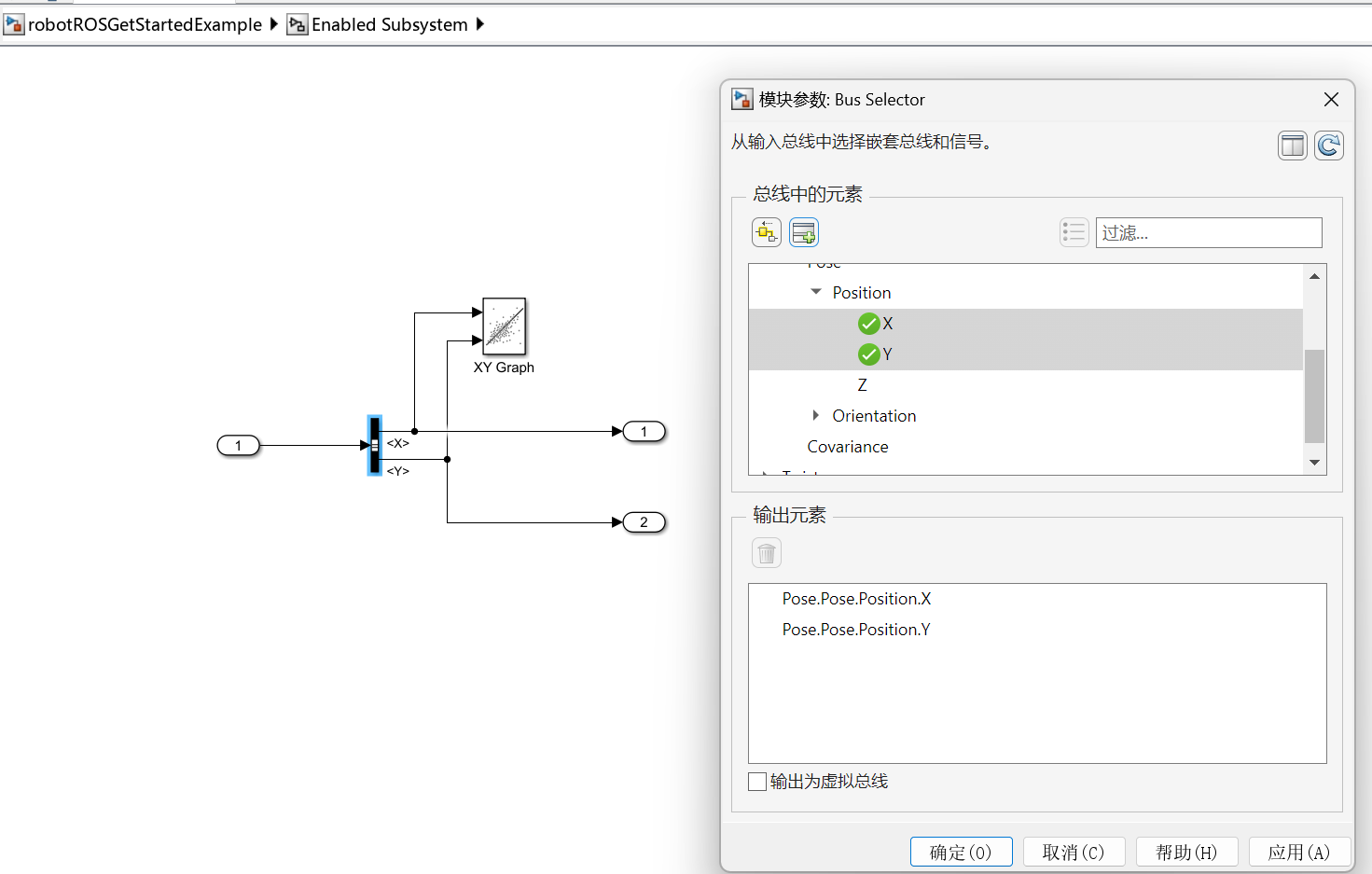
配置 Bus Selector
注意因为消息格式已经更改,我们双击Enabled Subsystem模块,在打开的子模块中,双击Bus Selector模块,在 Pose->Pose->Position 中选择X,Y,点击上方的添加到输出,同时删除原来输出元素的 X 和 Y,这样就可以显示 TOM06S 底盘的 Odom 估计的位置数据。
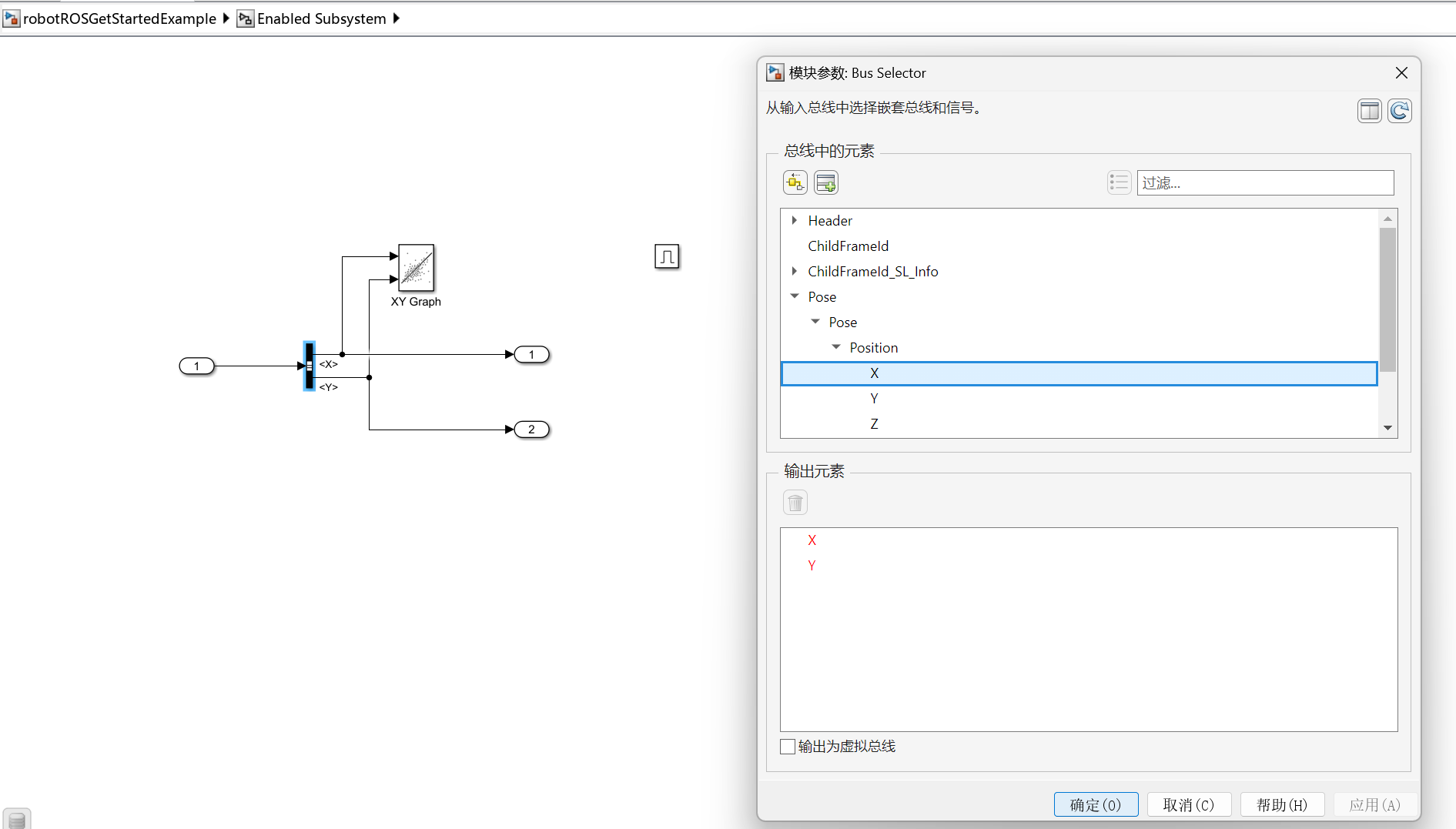
选择需要的总线和信号

添加完成后,点击应用确定即可
模型设置完成后,请确保 TOM06S 底盘处于安全的环境下。点击运行按钮,就可以看到 TOM06S 底盘按照设定的 Sine Wave 的速度和转向运动了。我们可以在 Simulink 的Display中看到回传的 Odom 位置数据,包括 X 和 Y 坐标。
参考
TOM06S 与 MATLAB 连接还可以实现更多功能,比如使用 Computer Vision Toolbox 进行图像处理,使用 Deep Learning Toolbox 进行深度学习等。更多功能请参考 MATLAB 官方文档。我们也有一篇文章MATLAB 是如何应用到人工智能的?可供参考。