实验七 多点导航
【实验目标】
- 实现多点导航(真实场景)
- 实现多点导航(仿真环境)
【实验内容】
多点导航真车应用基于launch文件
在实际环境中实现多点导航
1、启动真车
shell
roslaunch tianracer_bringup tianracer_bringup.launch2、启动导航
shell
roslaunch tianracer_navigation tianracer_teb_nav.launch3、启动多点导航
shell
roslaunch tianracer_navigation tianracer_multi_goal.launch多点导航仿真应用
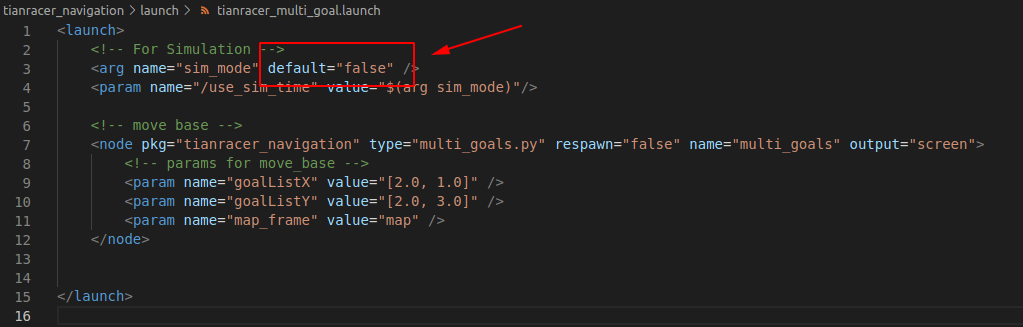
在 simulator 仿真环境中实现多点导航,先修改 tianracer_multi_goal.launch 文件,将 false 改为 true,保存
提示
通过修改tianracer_multi_goal.launch文件中的goalListX,goalListY两个参数,就可以控制发布目标点的位置
goalListX:X 坐标列表goalListY:Y 坐标列表 顺序排列,当然这时使用的方法尽管比较直接,但是不够灵活
‘’ 1、启动仿真环境
shell
roslaunch f1tenth_simulator simulator.launch2、启动多点导航
shell
roslaunch tianracer_competition tianracer_multi_goal.launchRVIZ选点+基于剩余路径点的预发布策略 (仅适用于 24-08-08 后出货的平台)
提示
下述操作需要在实车上进行
1、启动真车
shell
roslaunch tianracer_bringup tianracer_bringup.launch2、启动导航
shell
roslaunch tianracer_navigation tianracer_teb_nav.launch use_rviz:=true map_file:=xxxxx # xxxxx为保存地图时的文件名称3、启动目标点生成工具
shell
roslaunch tianracer_gazebo click_waypoint.launch filename:=test_points # 设置路径点保存文件名为test_points使用2D Nav Goal工具,逐个点击地图上的点,以生成多个导航目标点,使用Ctrl + C保存
默认状态下,生成的目标点文件位于tianracer_gazebo/scripts/waypoint_race/test_points.yaml中
4、启动基于剩余路径点控制预发布策略
shell
export TIANRACER_WORLD=test # 设置环境变量使得multi_goals_rc3.py能够正确读取test_points.yaml文件, 注意不要拼写错误
rosrun tianracer_gazebo multi_goals_rc3.py __ns:=tianracer完整流程参考
基于剩余路径点的预发布策略(仅适用于 25-03-03 后出货的平台)
提示
下述操作需要在实车上进行
1、启动真车
shell
roslaunch tianracer_bringup tianracer_bringup.launch2、启动导航
shell
roslaunch tianracer_navigation tianracer_teb_nav.launch use_rviz:=true map_file:=xxxxx # xxxxx为保存地图时的文件名称shell
roslaunch tianracer_rviz view_teb_planner.launch3、启动目标点生成工具
shell
roslaunch tianracer_gazebo click_waypoint.launch filename:=test_points # 设置路径点保存文件名为test_points点击查看输出结果
bash
... logging to /home/tianbot/.ros/log/103b9b86-f8a3-11ef-af1f-48b02debe296/roslaunch-tianbot-orin-nano-124139.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.0.213:36315/
SUMMARY
========
PARAMETERS
* /click_waypoint/filename: /home/tianbot/tia...
* /rosdistro: noetic
* /rosversion: 1.16.0
NODES
/
click_waypoint (tianracer_gazebo/waypoint_generator.py)
ROS_MASTER_URI=http://localhost:11311kv
process[click_waypoint-1]: started with pid [124301]
[INFO] [1741056497.558010]: Initialized, use 2D Nav Goal to generate waypoints in your map
[WARN] [1741056497.563058]: press Ctrl+C to save!
[INFO] [1741056585.994035]: Clicked : (-0.8600000739097595, 2.799999713897705, 0.0)
[INFO] [1741056635.688134]: Clicked : (2.5054666996002197, -4.861459255218506, 0.0)
[INFO] [1741056646.807771]: Clicked : (-1.8506286144256592, 2.8969454765319824, 0.0)
[INFO] [1741056654.131478]: Clicked : (0.42706814408302307, -3.9219095706939697, 0.0)
^C[click_waypoint-1] killing on exit
[INFO] [1741056659.568502]: your waypoints files save as:
------------------------------------------------
/home/tianbot/tianbot_ws/src/tianracer/tianracer_gazebo/scripts/waypoint_race/test_points.yaml
------------------------------------------------
[INFO] [1741056659.581228]: File generated
shutting down processing monitor...
... shutting down processing monitor complete
done使用2D Nav Goal工具,逐个点击地图上的点,以生成多个导航目标点,使用Ctrl+ C保存
默认状态下,生成的目标点文件位于tianracer_gazebo/scripts/waypoint_race/test_points.yaml中
4、启动基于剩余路径点控制预发布策略
shell
export TIANRACER_WORLD=test # 设置环境变量使得multi_goals_rc3.py能够正确读取test_points.yaml文件, 注意不要拼写错误
rosrun tianracer_gazebo multi_goals_rc3.py __ns:=tianracer # tianracer为此时的机器人名字空间完整流程参考