竞赛咨询 / 产品购买
📞 13689205983 📧 zhaojunjie@tianbot.com
实用文档
外观
启动rgbd_camera节点,获取彩色图像与深度图像
1、启动底盘
roslaunch tianbot_bringup tianbot_bringup.launch
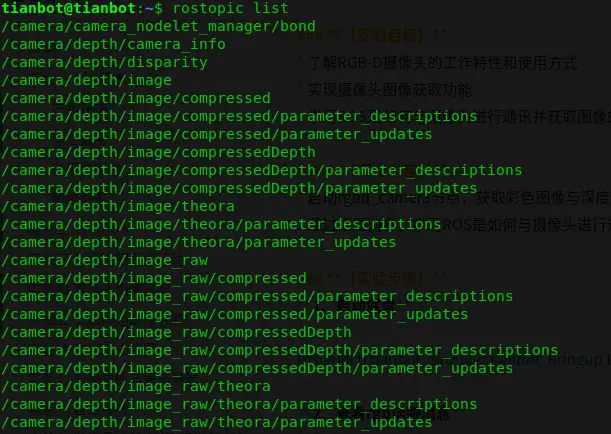
2、查看camera相关话题消息
rostopic list
3、启动Rviz,查看深度图像
roslaunch tianbot_rviz view_image.launch
4、更改配置,查看彩色图像