实验八 视觉SLAM
【实验目标】
- 了解什么是SLAM
- 实现视觉SLAM功能
【实验内容】
SLAM概述
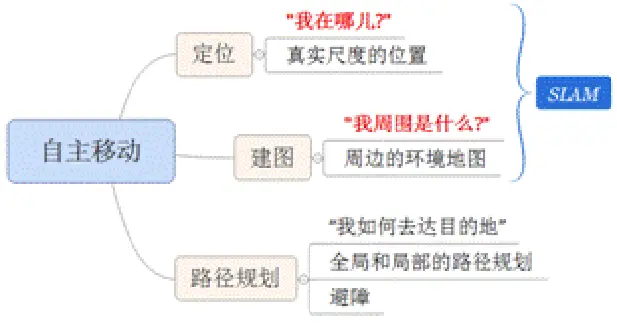
SLAM(Simultaneous Localization and Mapping),同步定位与地图构建,最早在机器人领域提出,它指的是:机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的环境特征定位自身位置和姿态,再根据自身位置构建周围环境的增量式地图,从而达到同时定位和地图构建的目的。 如下图,通俗的来讲,SLAM回答两个问题:“我在哪儿?”“我周围是什么?”,就如同人到了一个陌生环境中一样,SLAM试图要解决的就是恢复出观察者自身和周围环境的相对空间关系,“我在哪儿”对应的就是定位问题,而“我周围是什么”对应的就是建图问题,给出周围环境的一个描述。回答了这两个问题,其实就完成了对自身和周边环境的空间认知。有了这个基础,就可以进行路径规划去达要去的目的地,在此过程中还需要及时的检测躲避遇到的障碍物,保证运行安全。
视觉SLAM(if applicable)
移动机器人不仅可以进行激光雷达SLAM,还可以进行视觉SLAM,视觉SLAM是利用深度相机完成的 1、启动底盘
shell
roslaunch tianbot_bringup tianbot_bringup.launch2、启动视觉SLAM
shell
roslaunch tianbot_slam tianbot_gmapping.launch3、启动Rviz,使用2D Nav Goal进行导航
shell
roslaunch tianbot_rviz view_nav_amcl.launch视觉SLAM简介
视觉SLAM主要是基于相机来完成环境的感知工作,相对而言,相机成本较低,容易放到商品硬件上,且图像信息丰富,因此视觉SLAM也备受关注。目前,视觉SLAM可分为单目、双目(多目)、RGBD这三类,另还有鱼眼、全景等特殊相机,但目前在研究和产品中还属于少数,此外,结合惯性测量器件(Inertial Measurement Unit,IMU)的视觉SLAM也是现在研究热点之一。从实现难度上来说,大致将这三类方法排序为:单目视觉>双目视觉>RGBD。