实验八 深度学习与视觉导航
【实验目标】
- 了解Action通信
- 写一个简单的C++程序,控制小车自主导航到目标点
- 通过ROSECHO触发控制小车运动
【实验内容】
Action通信
机器人导航到某个目标点,此过程需要一个节点A发布目标信息,然后一个节点B接收到请求并控制移动,最终响应目标达成状态信息。不同于服务通信,在导航过程中,Action 通信服务端可以连续反馈当前机器人状态信息,客户端可以接收连续反馈并且还可以取消任务。当导航终止时,再返回最终的执行结果。 客户端服务端交互图解: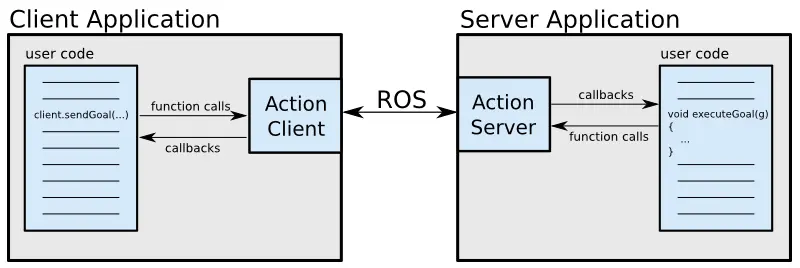
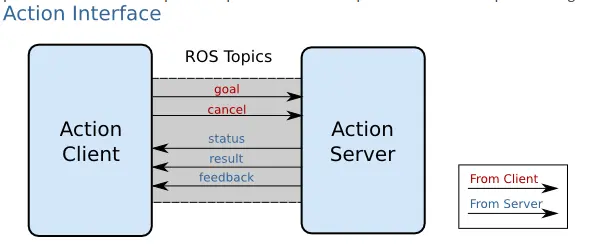 详细讲解参考ROS官网:http://wiki.ros.org/actionlib 为了便于理解,接下来我们写一个简单的程序,用ROS中提供的actionlib功能包集来实现Action通信。
详细讲解参考ROS官网:http://wiki.ros.org/actionlib 为了便于理解,接下来我们写一个简单的程序,用ROS中提供的actionlib功能包集来实现Action通信。
写一个C++程序,通过订阅move_base服务器,控制小车导航到目标点
我们用VS Code来写程序 1、在tianbot_bringup功能包下新建文件夹src,用来存放C++文件,新建simple_goals.cpp文件,将下列源码复制粘贴进去,最好自己敲一遍。
cpp
#include <ros/ros.h>
#include <move_base_msgs/MoveBaseAction.h>
#include <actionlib/client/simple_action_client.h>
typedef actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction\>MoveBaseClient;
int main(int argc, char** argv)
{
ros::init(argc, argv, "simple_goals");
//tell the action client that we want to spin a thread by default
MoveBaseClient ac("move_base", true);
//wait for the action server to come up
while(!ac.waitForServer(ros::Duration(5.0)))
{
ROS_INFO("Waiting for the move_base action server to come up");
}
move_base_msgs::MoveBaseGoal goal;
//we'll send a goal to the robot to move 1 meter forward
goal.target_pose.header.frame_id = "odom";
goal.target_pose.header.stamp = ros::Time::now();
goal.target_pose.pose.position.x = 1.0;
goal.target_pose.pose.orientation.w = 1.0;
ROS_INFO("Sending goal");
ac.sendGoal(goal);
ac.waitForResult();
if(ac.getState() == actionlib::SimpleClientGoalState::SUCCEEDED)
ROS_INFO("Hooray, the base moved 1 meter forward");
else
ROS_INFO("The base failed to move forward 1 meter for some reason");
return 0;
}2、修改当前功能包下的CMakeList文件,添加以下文件来为程序编译生成可执行文件 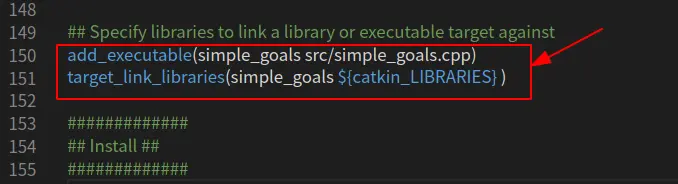 添加actionlib依赖
添加actionlib依赖 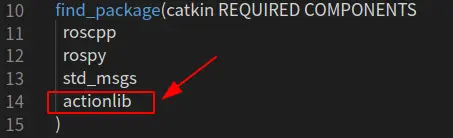 3、catkin_make编译,source devel/setup.bash,启动自主导航步骤后,运行该程序:
3、catkin_make编译,source devel/setup.bash,启动自主导航步骤后,运行该程序:rosrun tianbot_bringup simple_goals 在rviz中观察或观察小车,发现小车向前行进了1米!
ROSECHO触发控制小车
参考ROSECHO功能包的demo.py脚本文件,学习用语音控制小车