常见问题
cartographer 建图导航说明
Cartographer 建图功能需要与远程计算机配合 (配合 ROS2GO 或已顺利配置 Cartographer 系统环境的 workstation) 功能运行时设备分工如下:
TIANRACER 平台负责采集传感器数据 (LDS、IMU 等) 远程计算机负责启动 Cartographer 建图算法,并以图形化方式呈现地图 (RVIZ) 在选择场地或场地布局时,跑道不要太单调,可以随机放一些障碍物,否则不能确定在地图上的位置。 cartographer 地图保存rosrun map_server map_saver --occ 51 --free 49 -f test_carto_map在当前目录下会生成test_carto_map.yaml和test_carto_map.pgm
设置转向舵机的中点
在运行 RACECAR 的过程中如果发现小车运行速度过快,过慢,舵机异响等问题,可以按照下面步骤进行设置。 运行速度可以在相同的启动文件tianracer_navigation/launch/includes/tianbot_move_base.launch.xml通过修改“baseSpeed”设置,你可以尝试不同的速度运行。“baseangle”是调整伺服的中间点这些修改应该在你的车载主控上。 注意:这里修改的速度在启动tianbot_move_base.launch.xml后并不会让小车开始运动,只有给定目标地点,路径规划开始后,小车将会以设定的 baseSpeed 速度运动(确保 ESC 电源开关处于打开状态)。
编辑地图
我们在导航的时候,地图应该做一些修改,因为需要闭合边缘并添加一条终点线,而闭合边缘的映射可能不完整。需要手动做一些修改,让边缘变成连续,我们可以使用 GIMP 这个软件进行地图的编辑,该软件在 ROS2GO 中已预置。
遥控器无法使用
接收器已安装于车体内部出厂前,遥控器与接收机已完成对频,通电后接收机 LED 指示灯为绿灯长亮此为正常状态,如果在使用过程中,接收器指示灯闪烁,遥控器无法控制车辆,需对遥控器和接收机进行对频,请按照如下方法操作:
- 打开车体找到对应接收器,接收机对频按键位于对频孔内。
- 保证接收机已经供电,如附近有已经开启的遥控器,则接收机 LED 指示灯为红灯长亮。
- 打开需要对频的遥控器,并将其靠近接收机,此时接收机 LED 指示灯变为绿灯闪烁。
- 长按接收机对频按键 2s,对频过程中接收机 LED 指示灯为红灯闪烁。
- 释放对频按键,对频完成,此时接收机 LED 指示灯为绿灯长亮。
jeston nano emmc 版本如何驱动 sd 卡
SD 补丁文件下载
添加设备树文件
首先从emmc上启动小车镜像,然后使用vnc接入小车
使用U盘或sftp、scp方式拷贝SD补丁文件到/boot目录下,可使用如下命令验证是否拷贝完成
ls /boot/ | grep sd编辑系统驱动文件
sudo gedit /boot/extlinux/extlinux.conf修改 /boot/extlinux/extlinux.conf,内容如下
TIMEOUT 30
DEFAULT primary
MENU TITLE L4T boot options
LABEL primary
MENU LABEL primary kernel
LINUX /boot/Image
INITRD /boot/initrd
FDT /boot/tegra210-p3448-0002-p3449-0000-b00-sd-patch-on-emmc.dtb # 添加这一行
APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0 fbcon=map:0 net.ifnames=0 sdhci_tegra.en_boot_part_access=1
# When testing a custom kernel, it is recommended that you create a backup of
# the original kernel and add a new entry to this file so that the device can
# fallback to the original kernel. To do this:
#
# 1, Make a backup of the original kernel
# sudo cp /boot/Image /boot/Image.backup
#
# 2, Copy your custom kernel into /boot/Image
#
# 3, Uncomment below menu setting lines for the original kernel
#
# 4, Reboot
# LABEL backup
# MENU LABEL backup kernel
# LINUX /boot/Image.backup
# INITRD /boot/initrd
# APPEND ${cbootargs}重启
sudo reboot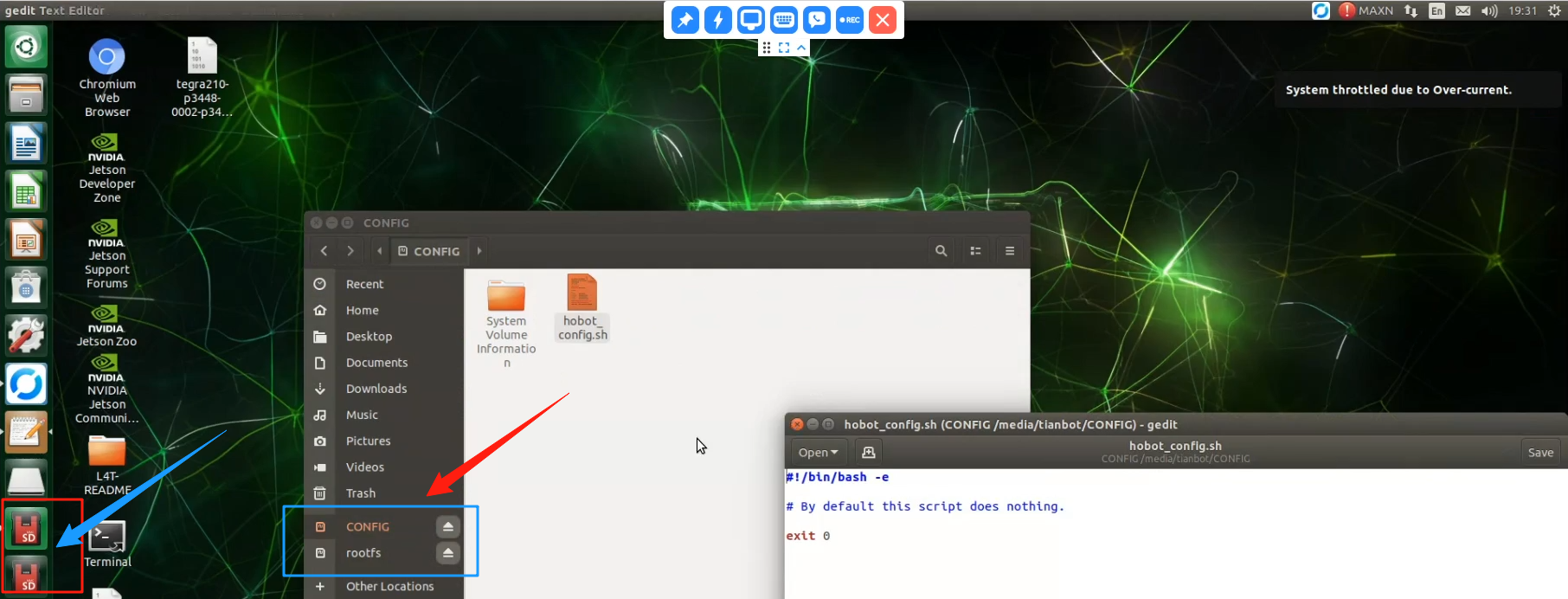
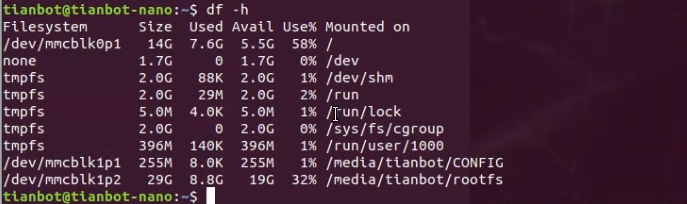
验证
df -h- /dev/mmcblk0p1 # emmc
- /dev/mmcblk1p1 # sd