实验四 定位与建图 SLAM
【实验目标】
【实验目标】
学习 F1TENTH 仿真环境 simulator 下 Scan Matching(扫描匹配定位算法) 学习蒙特卡洛定位法 实现三种激光雷达建图算法的使用,并对比建图效果 了解激光雷达消息结构
【实验内容】
Scan Matching 扫描匹配定位算法
该实验处理机器人技术中的定位问题,并介绍了定位及其在自主堆栈中的重要性。通过实验,实现了最基本的定位算法之一,即(Scan Matching)扫描匹配。该方法不使用里程计信息,但扫描匹配的输出结果可以结合里程计,以提升定位精度。该方法使用了迭代最近点算法,本实验您将了解到,它在路径规划和轨迹跟踪中的重要性。
Particle Filter 粒子滤波
粒子滤波通过非参数化的蒙特卡洛 (Monte Carlo) 模拟方法来实现递推贝叶斯滤波,适用于任何能用状态空间模型描述的非线性系统,精度可以逼近最优估计。粒子滤波器具有简单、易于实现等特点,它为分析非线性动态系统提供了一种有效的解决方法,从而引起目标跟踪、信号处理以及自动控制等领域的广泛关注。
GMapping 建图
启动 tianracer_gmapping 节点,用 GMapping 进行建图,并保存地图 1、启动底盘 先 SSH 远程连接
小车终端:
roslaunch tianracer_bringup tianracer_bringup.launch2、使用 GMpping 建图
小车终端
roslaunch tianracer_slam tianracer_gmapping.launch3、打开 Rviz 观察地图
个人 PC 终端:
roslaunch tianracer_rviz view_mapping.launch注意!!! 启动 rviz、rqt 等图形化界面,建议在个人 PC 端启动,也就是在计算机名为 ros2go 的终端
4、使用遥控器控制小车运动建图 5、地图尽量封闭后,保存地图
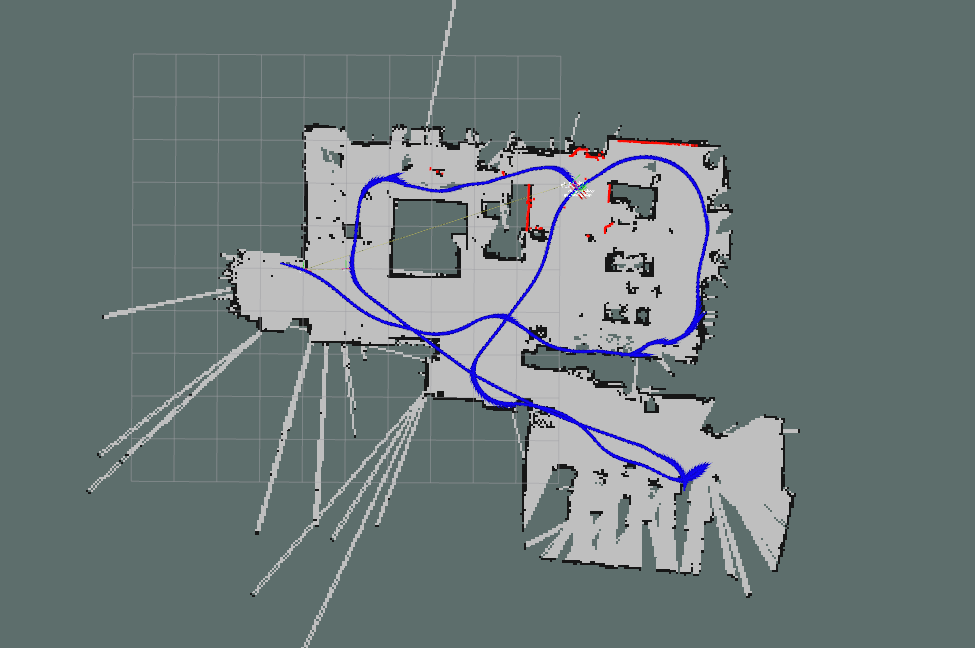
roslaunch tianracer_slam map_save.launch map_file:=gmapping(自定义地图名称)地图默认保存在 tianracer_slam/maps/目录下 gmapping 建图效果:
Cartographer 建图
由于 cartographer 运行需要占用大量计算资源,故没有在实车上直接安装cartographer,在 ROS2GO 上内置了cartographer,所以建议使用 ROS2GO 配合多机通信进行建图
实车与 ROS2GO 多机通信运行 cartographer
- 电脑启动
ROS2GO - 使用 ssh 连上车,
roslaunch启动tianracer_bringup驱动 ROS2GO端配置ROS_MASTER_URI和ROS_IP环境变量后,在配置好环境变量的终端里,继续运行
roslaunch tianracer_slam tianracer_cartographer.launch同样在配置好环境变量的终端里,运行
roslaunch tianracer_rviz view_mapping.launch查看当前的建图情况保存地图(此时可以在车上启动终端保存地图)
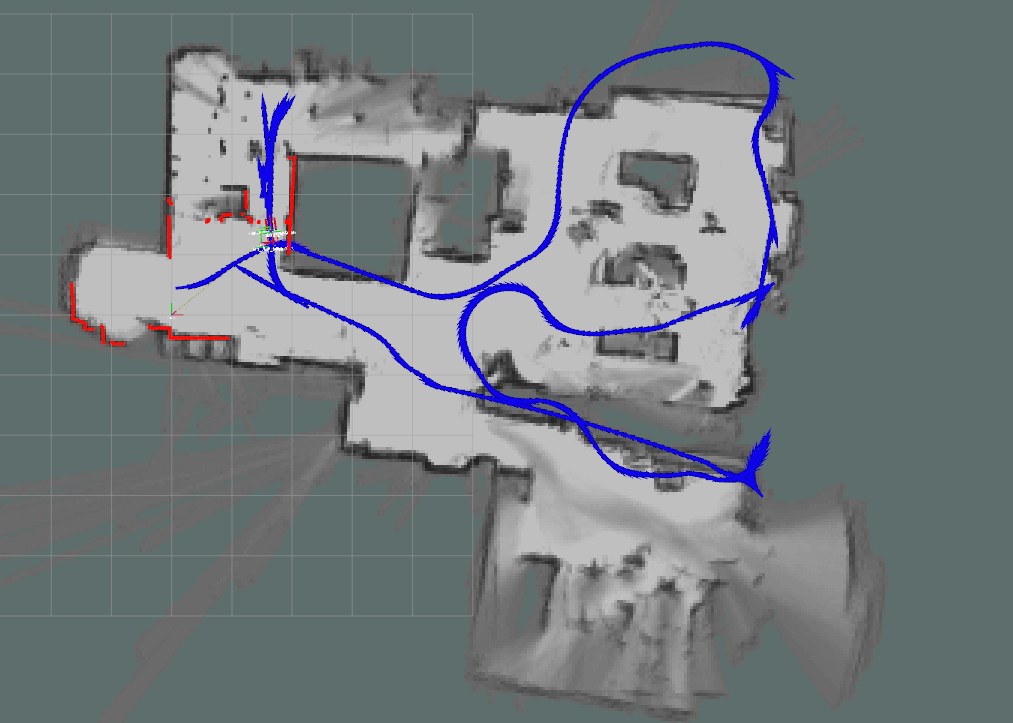
cartographer 建图效果:
Hector_Slam 建图
启动 tianracer_hector 节点,用 Hector_Slam 进行建图,并保存地图
roslaunch tianracer_slam tianracer_hector.launchhector_slam 建图效果如下:

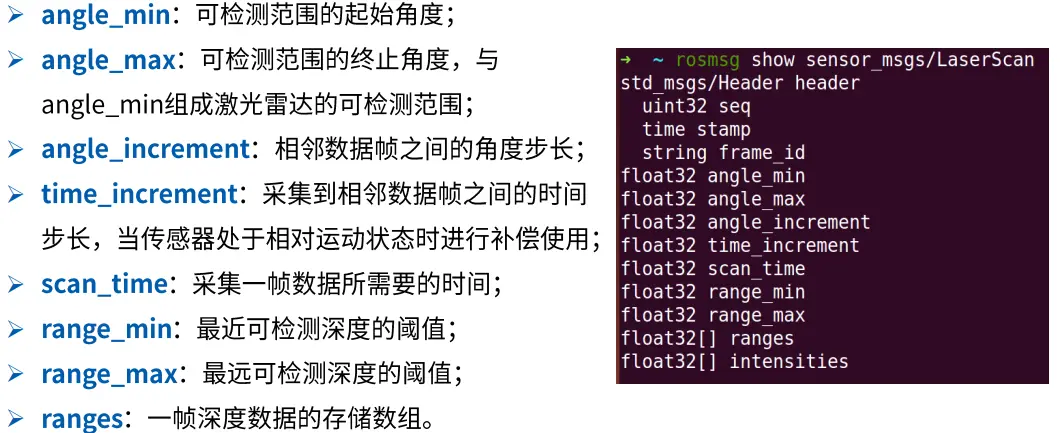
激光雷达消息结构
如何保存建立的地图
运行如下命令,则会将地图默认保存在 tianracer_slam/maps/目录下,名称为 tianbot_office
roslaunch tianracer_slam map_save.launch