实验四 二维码追踪导航
【实验目标】
- 实现用摄像头识别二维码进行追踪实验
- 实现二维码导航
- 学习ROS是如何用二维码进行导航的
【实验内容】
二维码导航
1、下载编译ar_tools功能包
已经下载编译完成,可直接使用
2、生成二维码图片(.png格式)
shell
$ roscore
$ rosrun ar_track_alvar createMarker 0
$ rosrun ar_track_alvar createMarker 1
$ rosrun ar_track_alvar createMarker 100上面命令分别生成了号码为0/1/100的二维码,文件格式为.png,文件位置在当前目录
3、启动命令
shell
roslaunch tianbot_bringup tianbot_bringup.launch
roslaunch tianbot_qrcode_nav tianbot_qrnav_alvar.launch4、入口节点解析
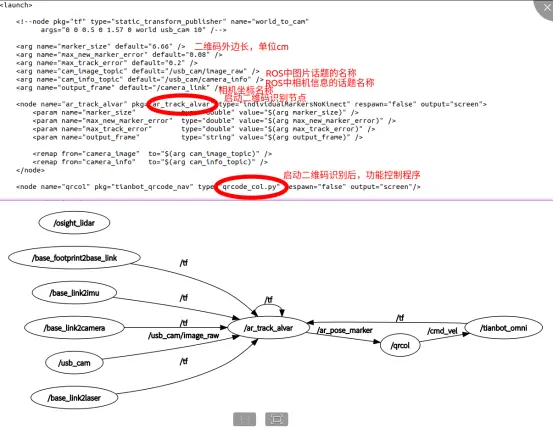
图1 启动文件及节点图
5、/ar_pose节点的二维码照片打印和配置方法

图2 启动文件配置
- object_4x4中添加相应的二维码信息
添加可以识别的二维码信息,本程序示例可以同时识别多张二维码,程序默认识别3张,如果想识别更多,请在object\_4x4文件中按照如下格式添加。
如:
- #pattern 3
- 4x4_3 #名称,同样是识别出坐标的名称
- data/4x4/4x4_3.patt #二维码的信息,在data中可以找到,比较重要
- 150.0 #二维码的图片边长大小(自己猜测的,待验证)
- 0.0 0.0 #相对原点参考相机坐标系的的坐标位置(自己猜测的,待验证)
图3 识别二维码配置
- 二维码图像的查找和打印
本程序只能识别被添加到object_4x4文件中的二维码信息,它们对应的二维码照片需要自己打印(A4)。
二维码图片文件和信息文件在一起,.gif是由于打印,.patt是用来给程序配置
打印照片目录:~/tianbot\_ws/src/ar\_tools/ar\_pose/data/4x4/gif/
配置文件目录:~/tianbot\_ws/src/ar\_tools/ar\_pose/data/4x4/
6、 qrcol节点的参数配置说明
文件位置:tianbot\_qrcode\_nav/script/qrcode\_col.py
- 二维码目标位置配置
本程序目标位置单纯指的是距离二维码中心的直线距离,默认正对二维码,距离参数:DISTANCE,默认值:1,单位:m。
- 速度增益配置
速度增益是指运动反应的快慢,如果觉得某方向上的反应速度不够,增大增益的绝对值(注意符号不要改变),反之减小绝对值。
- 最大运动速度配置
根据小车或者实际场景来确定各运动分量上的最大速度。
- 目标的容忍误差
在运动到目标的一定范围内,我们默认已经到达目标点,此时就不在给定速度,认为已经到达目标点。 
图4 运动参数调节