固件更新
准备工作
硬件准备工作
- 确保迷机器人双轮空悬不会在桌子上乱跑
- 确保迷你机器人正确配置网络,且连接到可以访问Internet的网络
- 确保迷你机器人用数据线连接到使用ROS2GO启动的电脑
软件准备工作
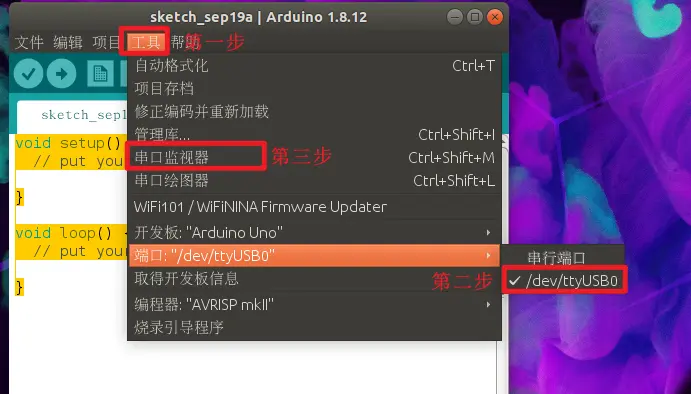
打开Arduino,在工具中选择迷你机器人对应的串口
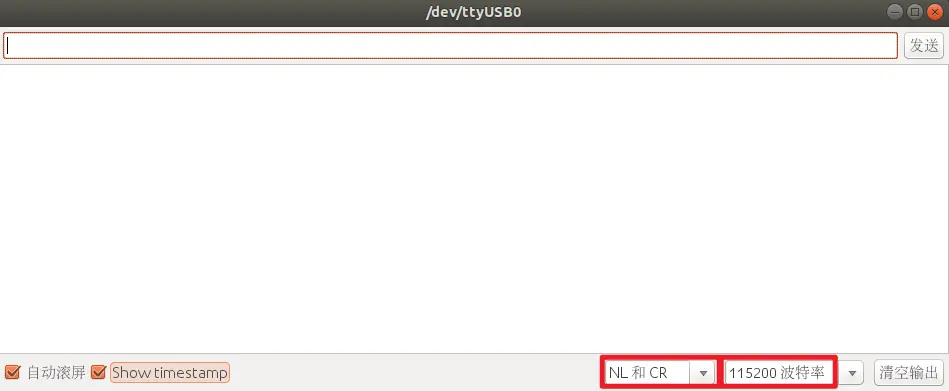
打开串口监视器,将波特率设置为115200,命令结束符选择NL、CR
输入命令:
shell
fwupload api.tianbot.com /ota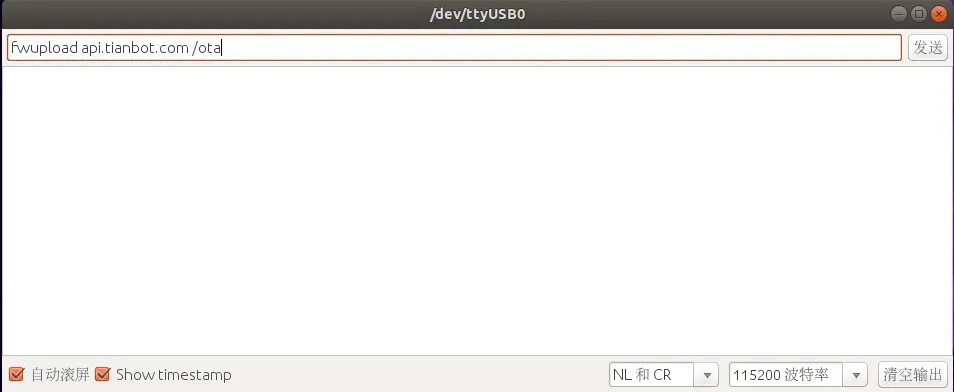
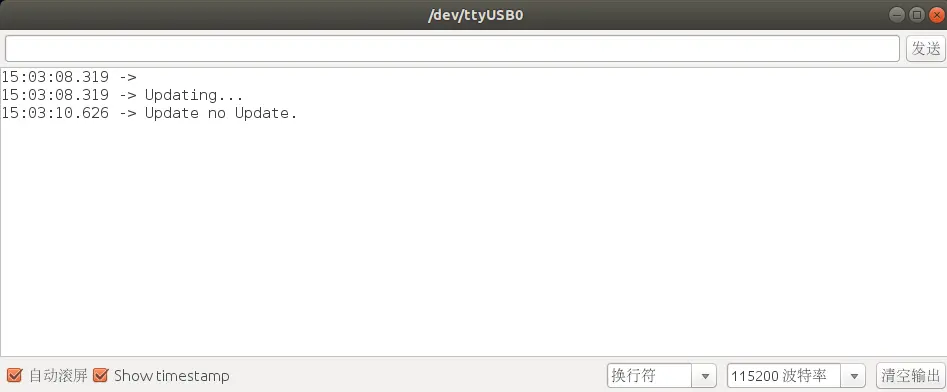
静静的等待,更新成功后机器人自动重启
注意事项
如果提示
update faild,按下重启按钮后再次输入fwupload api.tianbot.com /ota如果提示
no update,则当前版本为最新固件如果提示
You need to connect Internet first,需要配置迷你机器人网络可以正常连接外网,请查看开发进阶-连接外网章节。
软件更新
- https://github.com/tianbot/tianbot_mini
- https://github.com/tianbot/tianbot_mini_description
- https://github.com/tianbot/tianbot_mini_gazebo
如果您在更新的过程中遇到问题也可以随时在售后群中联系王老师,随叫随到呢!
常见问题
- 串口选择错误,导致无法链接串口
- 请依次排查确保正确选择串口后再打开串口监视器
- 现版本逻辑和早期版本可能有所区别,老版本遇到问题随时群里咨询即可。