Move_Base 框架分析
Move_Base
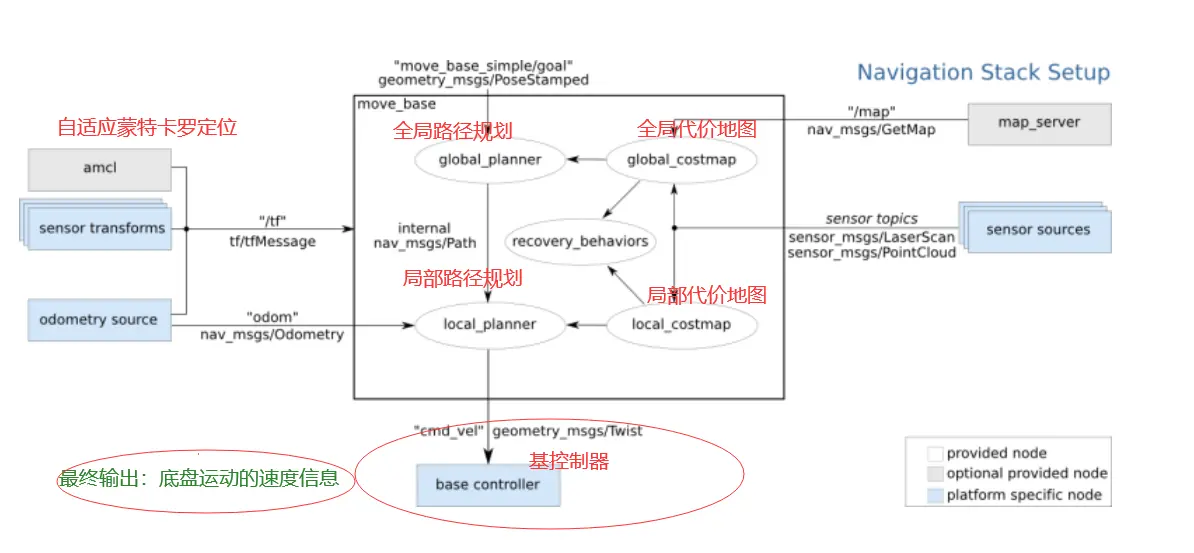
右部:
节点map_server 将地图信息,节点sensor sources将雷达信息、点云信息传至已在ROS系统中集成好的工装包集中,生成全局代价地图和局部代价地图。 左部:
提供定位和TF变换,将TF信息,和里程计信息,传至框内。amcl 是一个用于二维移动机器人的概率定位系统。它实现了自适应(或 KLD 采样)蒙特卡洛定位方法(如 Dieter Fox 所述),该方法使用粒子滤波器来跟踪机器人相对于已知地图的姿态。 上部:
目标点信息 goal 框内:
全局代价地图进行全局路径规划
局部代价地图进行局部路径规划
先全局路径规划,后局部路径规划,最后控制机器人底盘信息,即控制机器人移动
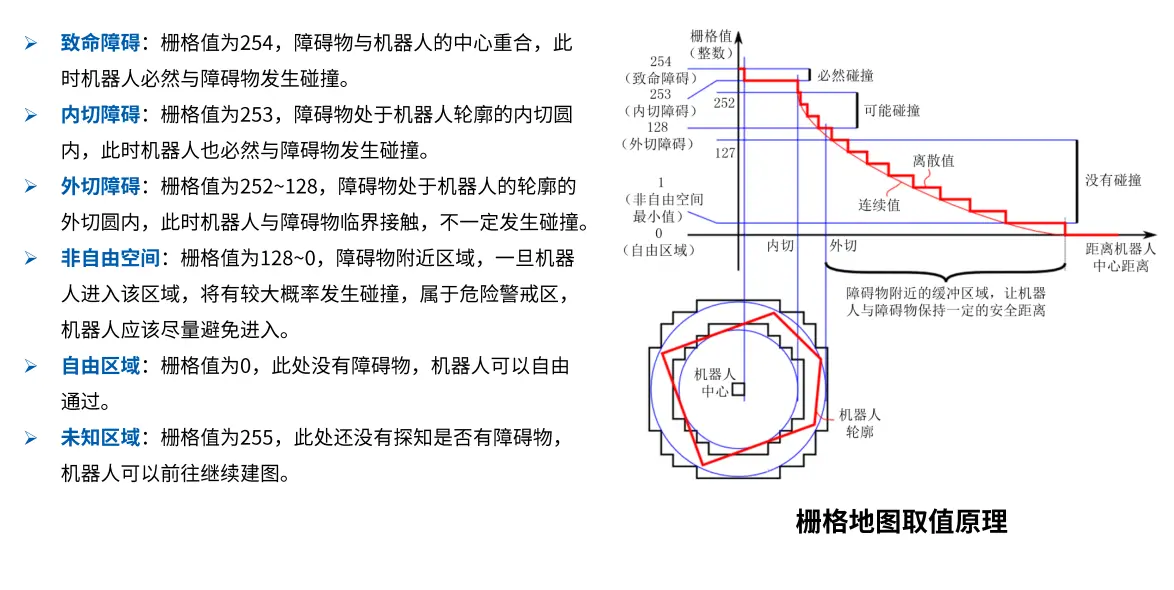
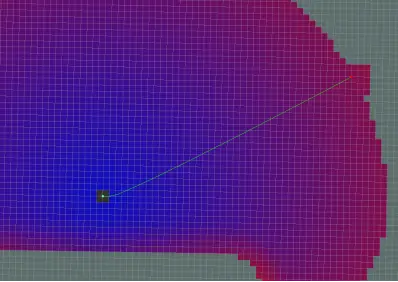
Costmap
http://wiki.ros.org/costmap_2d

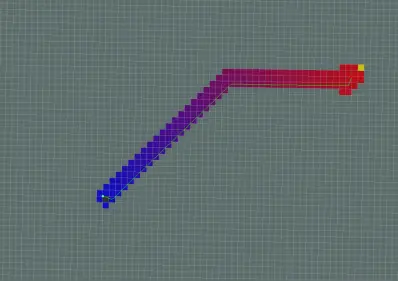
上图中,四周的红色边界代表代价地图中的障碍物,蓝色单元格代表被机器人内接半径膨胀的障碍物,红色多边形代表机器人的足迹。*为了机器人避免碰撞,机器人的足迹不应与红色单元格相交,机器人的中心点不应与蓝色单元格相交
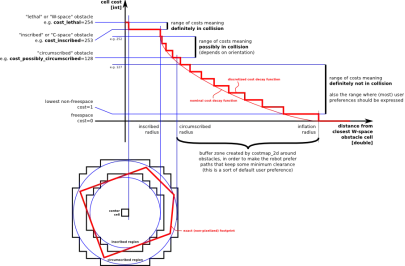
- 图片来源http://wiki.ros.org/costmap_2d* 翻译过来,也就是:
Global_planner
http://wiki.ros.org/global_planner
接受的信息包括全局的地图以及起点和目标点
ROS官方导航功能包有Dijkstra和A*算法,默认Dijkstra
Dijkstra广度优先,A深度优先,Dijkstra算法计算源点到其他所有点的最短路径长度,A关注点到点的最短路径(包括具体路径),Dijkstra算法的实质是广度优先搜索,是一种发散式的搜索,所以空间复杂度和时间复杂度都比较高。对路径上的当前点,A*算法不但记录其到源点的代价,还计算当前点到目标点的期望代价,是一种启发式算法 如图为Dijkstra广度优先
图片来源http://wiki.ros.org/global_planner 如图为A*深度优先
图片来源http://wiki.ros.org/global_planner
Dijkstra能保证一定是最短最优路径,A*不一定
Local planner
http://wiki.ros.org/base_local_planner
他接收全局路径规划器生成的路径,以及里程计的信息,地图信息,输出的是底盘运动的速度信息 先有全局路径规划器规划一条大致的路径,局部路径规划器把它分割成很多小段,再进行局部路径规划 在全局规划时对地图保存过的障碍物进行避障,在局部路径规划的时候会对新增的障碍物信息,也可以对运动的物体进行避障 DWA都是状态采样,先假设小车在什么位置,再根据这个位置的一系列状态信息,包括与退点的距离,与起点的距离,终点的距离,周围障碍物的信息等
AMCL
http://wiki.ros.org/amcl 自适应蒙特卡洛定位,粒子滤波就是用了蒙特卡洛思想的方法,把粒子滤波用到定位上就叫做蒙特卡洛定位,粒子滤波包括初始化计算权重、重采样、状态转移
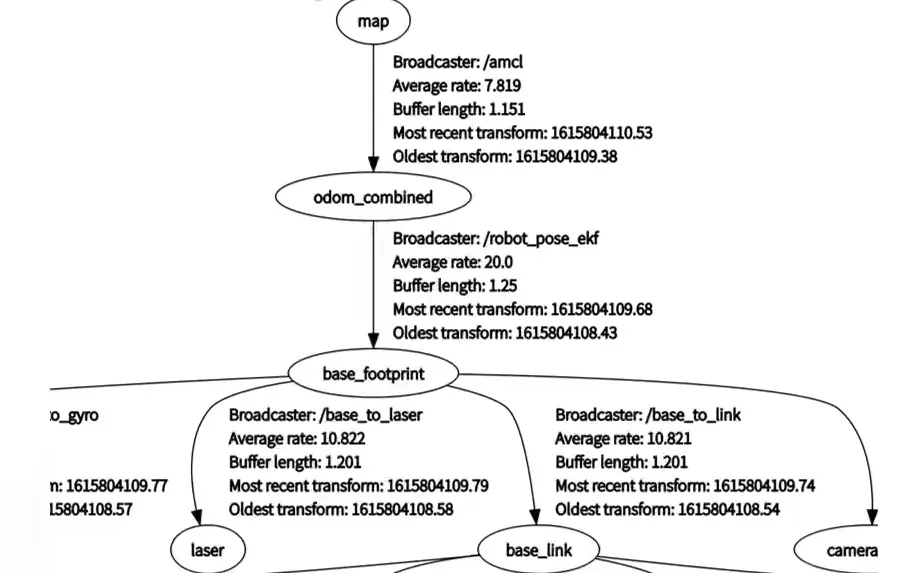
开了导航节点的tf关系图,从map开始通过amcl广播,Map和odom combined的关系,再由ekf节点拓展卡尔曼功能包转换到小车的底座,拓展卡尔曼滤波处理的是里程计数据
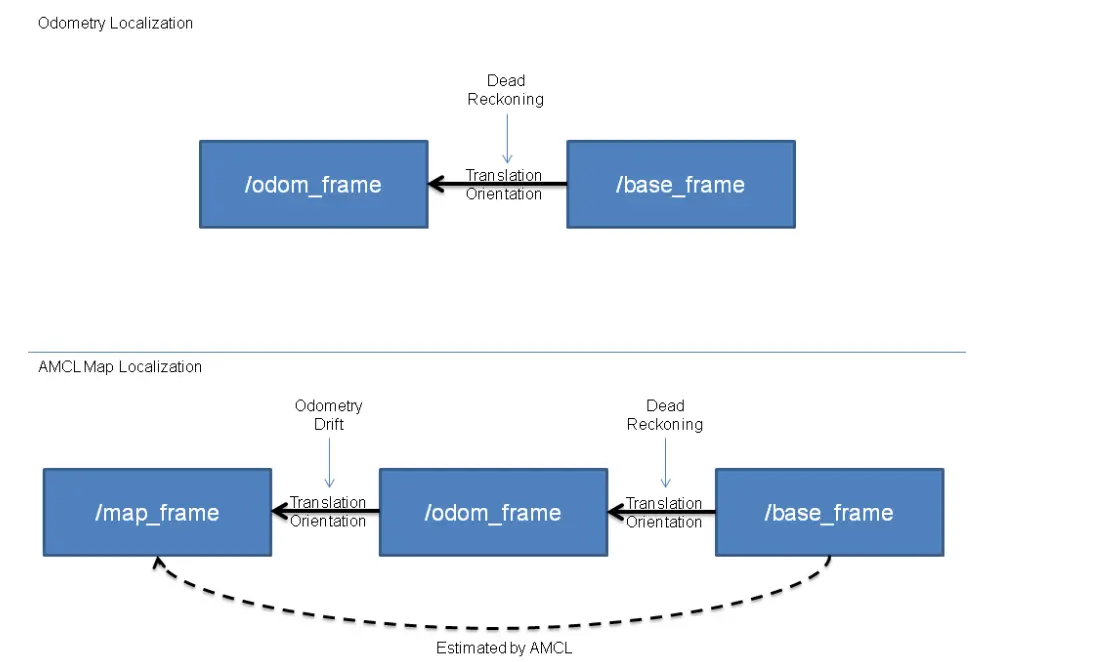
只处理里程计数据是无法完成定位的,没有办法关联到map上面,里程计只记录机器人走的路程,通过amcl处理后就可以完成,在地图上的定位关联上map