ROS控制机器人运动
视频地址
概要:
使用teleop.launch键盘控制节点,Rqt,rostopic_pub三种方法控制小车运动,讲解了QT界面,rostopic pub的使用,补充了坐标系知识
正文:
1.键盘节点控制移动
首先启动小车
shell
roslaunch tianbot_mini bringup.launch再新打开一个终端启动键盘控制节点
shell
roslaunch tianbot_mini teleop.launch这时把光标放在teleop.launch的命令框上就能键盘控制小车移动了
再来观察一下话题
shell
rostopic list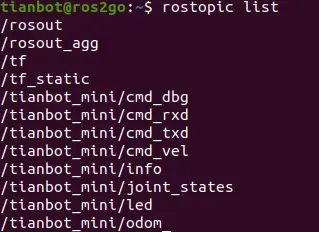
添加键盘遥控,并没有新增新的话题,但小车为什么还能移动?
rostopic echo /topic将消息输出屏幕
我们使用rostopic echo 分别监听各个话题,同时键盘遥控小车,发现cmd_vel话题随键盘控制发出了信息,上一小节我们使用rostopic list -v发现cmd_vel是subscribed topic,说明cmd_vel与小车运动相关。
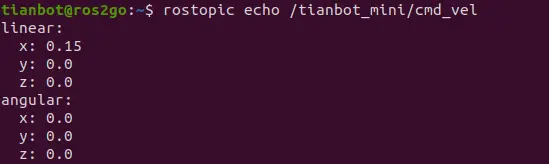
实际上,cmd_vel发布Twist信息,包含了机器人期望前进速度和转向速度。
2.rostopic_pub使小车移动
我们还可以直接给话题topic发送命令,rostopic pub/topic type args 将数据发送到主题,它允许我们直接从命令行中对任意主题创建和发布命令
shell
rostopic pub /tianbot_mini/cmd_vel geometry_msgs/Twist
linear:
X:0.0
Y:0.0
Z:0.0
Angular:
X:0.0
Y:0.0
Z:0.0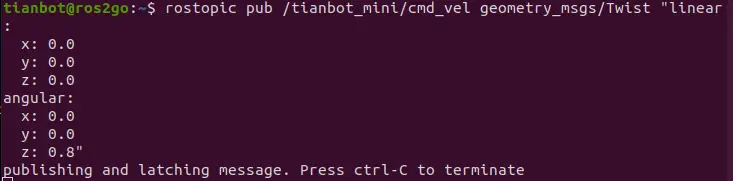
将angular的z改为0.8,就可看到Tianbot_mini开始转圈,我们就完成了rostopic pub 控制机器人移动
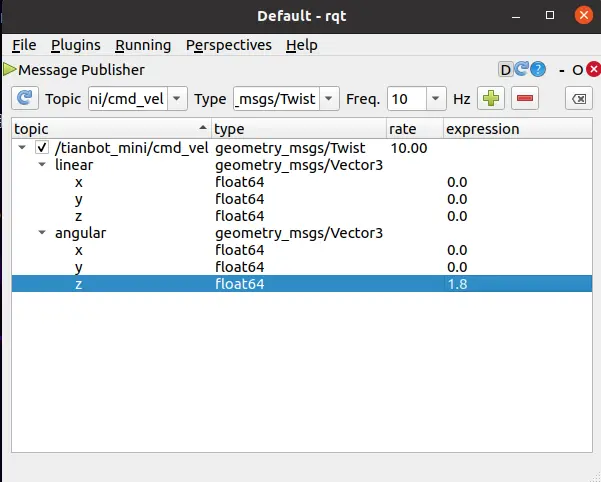
3.Rqt时机器人移动
Rqt图形化的方式使机器人运动起来 在已启动机器人的情况下,新打开一个终端,输入rqt
rqt直接打开,按下图配置,z轴设为1.8,Tianbot_mini开始原地转圈。
shell
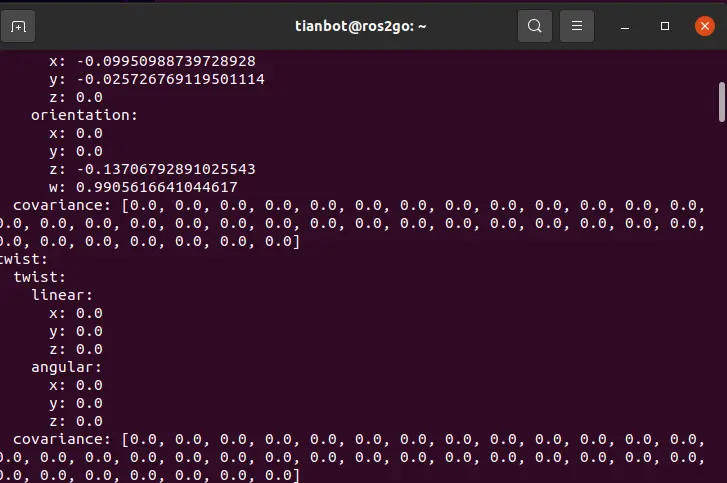
rostopic echo /tianbot_mini/odom在此对机器人坐标系做出补充:
map:地图坐标系,一般设该坐标系为固定坐标系
base_link:机器人本体坐标系,与机器人中心重合
机器人的里程,上电的那一刻的位置信息和速度信息
odom:里程计坐标系
base_laser:激光雷达的坐标系,与激光雷达的安装点有关
按住小车走一下,观察里程计的变化