常见问题
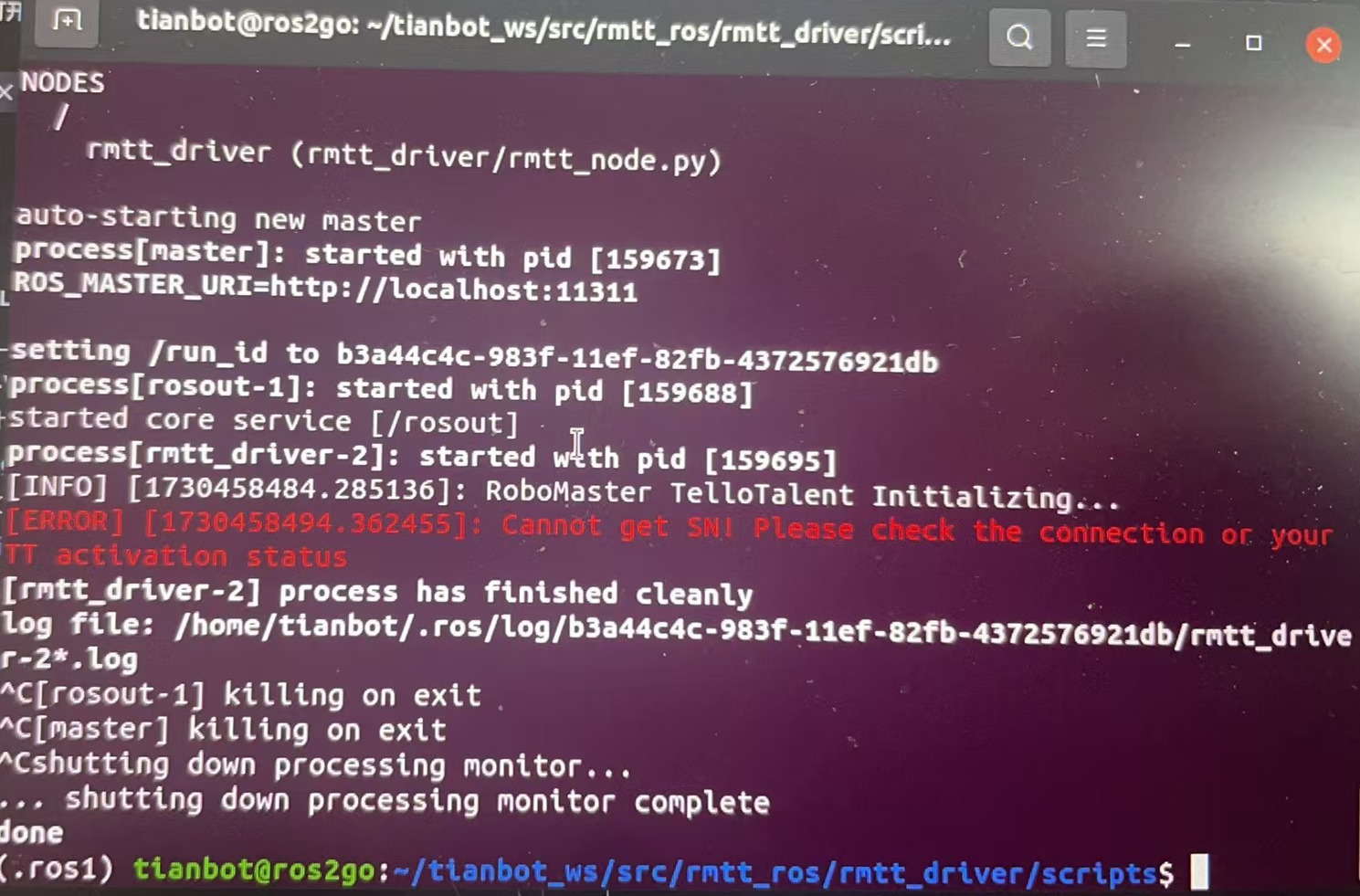
运行 rmtt_bringup.launch 驱动报错 Invalid SN
WARNING: THIS DEVICE IS NOT VALID FOR TIANBOT TT ROS DRIVER.
PLEASE CONTACT TIANBOT FOR TECH SUPPORT.
WEBSITE: www.tianbot.com
TELE: +86-25-66046936- 如果 rmtt 是直接从
Tianbot这买的话,可将购买的附订单号和序列号,发邮件到 zhaojunjie@tianbot.com,有专人处理 - 在 ROS2GO 上进行如下更新代码的操作后再尝试运行
rmtt_bringup.launch
请确已正确更新了驱动,并确保设备已连接到电脑。
更新代码
roscd rmtt_ros/..
git fetch && git pull -r如果遇到网络连接超时的问题
fatal: unable to access 'https://mirror.ghproxy.com/https://github.com/tianbot/rmtt_ros.git/': Failed to connect to mirror.ghproxy.com port 443: Connection timed out可以尝试使用国内加速源,具体方法如下:
提示
下述操作均在tianbot@ros2go:~/tianbot_ws/src/rmtt_ros$终端目录下进行
- 修改本地远端仓库地址
git remote set-url origin https://mirror.ghproxy.com/https://github.com/tianbot/rmtt_ros.git- 查看远端仓库地址是否修改成功
git remote -v输出如下
origin https://mirror.ghproxy.com/https://github.com/tianbot/rmtt_ros.git (fetch)
origin https://mirror.ghproxy.com/https://github.com/tianbot/rmtt_ros.git (push)- 获取远端的所有修改
tianbot@ros2go:~/tianbot_ws/src/rmtt_ros$ git fetch输出如下
remote: Enumerating objects: 9, done.
remote: Counting objects: 100% (9/9), done.
remote: Compressing objects: 100% (1/1), done.
remote: Total 5 (delta 4), reused 5 (delta 4), pack-reused 0
Unpacking objects: 100% (5/5), 10.03 KiB | 214.00 KiB/s, done.
From https://mirror.ghproxy.com/https://github.com/tianbot/rmtt_ros
f19c46c..f7169e1 main -> origin/main- 将获取的远端修改合并到本地工作区中
tianbot@ros2go:~/tianbot_ws/src/rmtt_ros$ git pull -r输出如下
Updating f19c46c..f7169e1
Fast-forward
rmtt_driver/scripts/rmtt_core.so | Bin 641112 -> 641112 bytes
1 file changed, 0 insertions(+), 0 deletions(-)
Current branch main is up to date.更新完成后查看当前工作区状态
tianbot@ros2go:~/tianbot_ws/src/rmtt_ros$ git status输出如下
On branch main
Your branch is up to date with 'origin/main'.
nothing to commit, working tree clean此时更新完成
调试的时候飞机老会自己关机,断联
正常连接到路由后,30s 会后自动起桨
- 如果没有自动起桨,请检查是否将电脑 wifi 连接到 RMTT-开头的飞机自建热点上,可以
登录路由器后台查看已连接设备 - 检查飞机的固件和激活状态,确保飞机已经激活,并且飞机固件版本是最新的。
- 确认拓展模块的固件版本是否是最新的,如果不是,请更新固件。
连不上 WIFI 热点
执行图中操作时,是否将电脑 wifi 连接到 RMTT-开头的飞机自建热点上?
确认一下RMTT是否激活,飞机激活后才能正常使用
- 检查飞机的固件和激活状态,确保飞机已经激活,并且飞机固件版本是最新的。
- 确认拓展模块的固件版本是否是最新的,如果不是,请更新固件。 具体参考 如何激活 RMTT 和升级拓展模块固件
如何激活 RMTT 和升级
- Robomaster TT * 1
- Micro usb 线 * 1
- 电脑 Windows * 1
下载固件升级的配套软件
提示
为了避免版本不兼容的问题,可以下载存档版本 通过网盘分享的文件:RoboMaster TT 激活升级 链接: https://pan.baidu.com/s/1RTxOFo7t1miaY-ZUznbiQA?pwd=2016 提取码: 2016 --来自百度网盘超级会员v2的分享
1.下载固件升级的配套软件
解压后,双击 RoboMasterAssistant.exe 运行
2.安装 cp210x 驱动
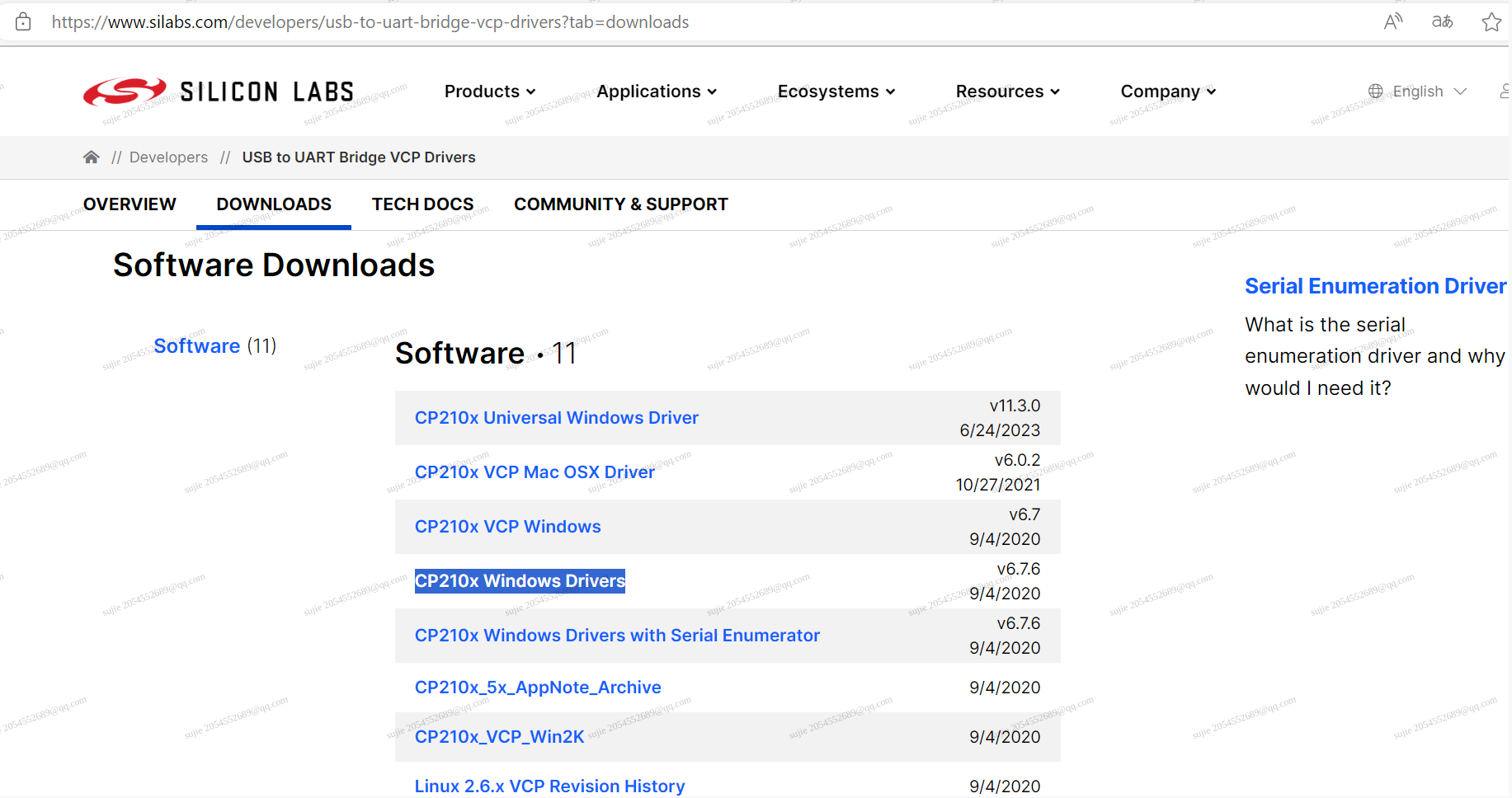
解压后,点击带有 CP210x_64 或 x_32 的.exe 运行安装即可
硬件连接

更新拓展模块
4.1 开源控制器 Wi-Fi 模块升级
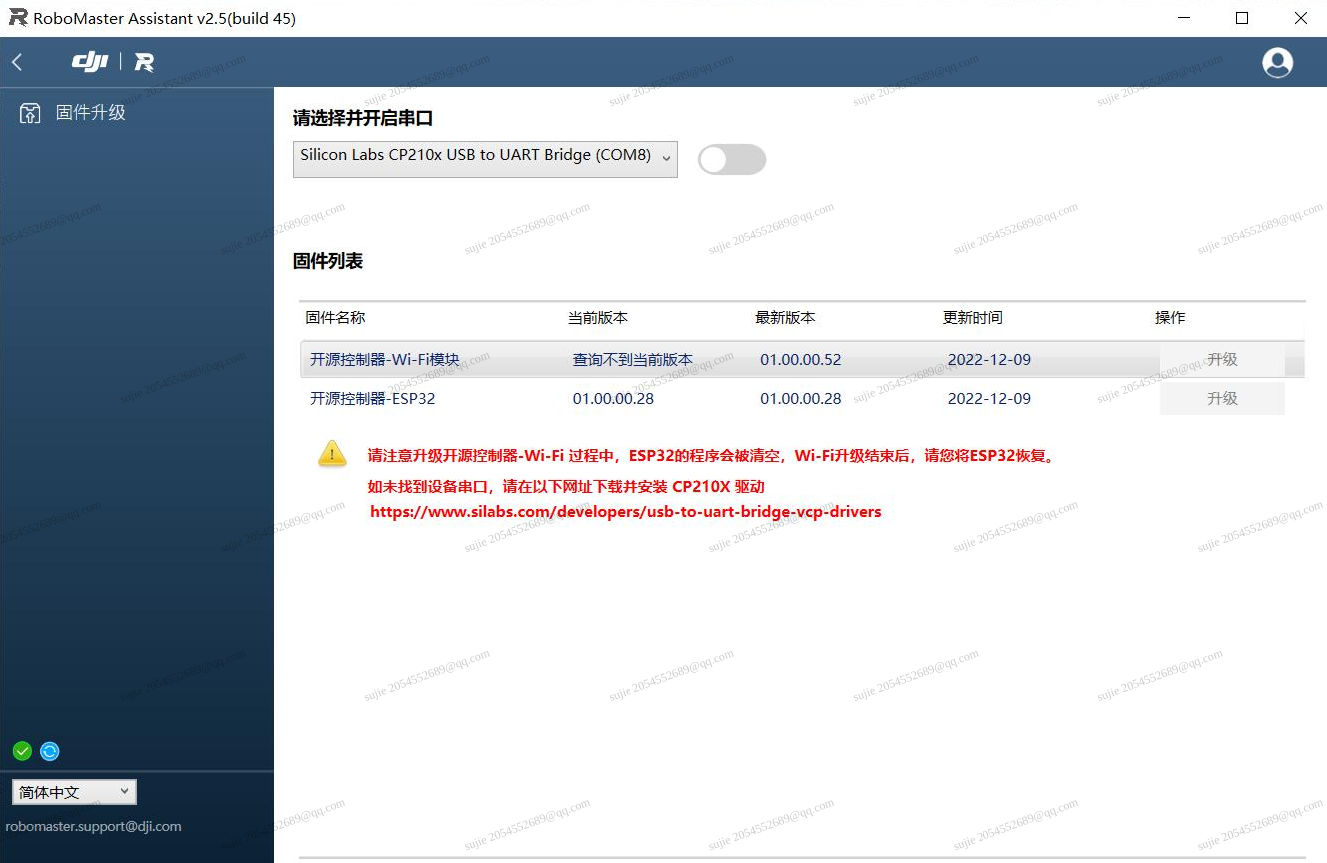
打开串口
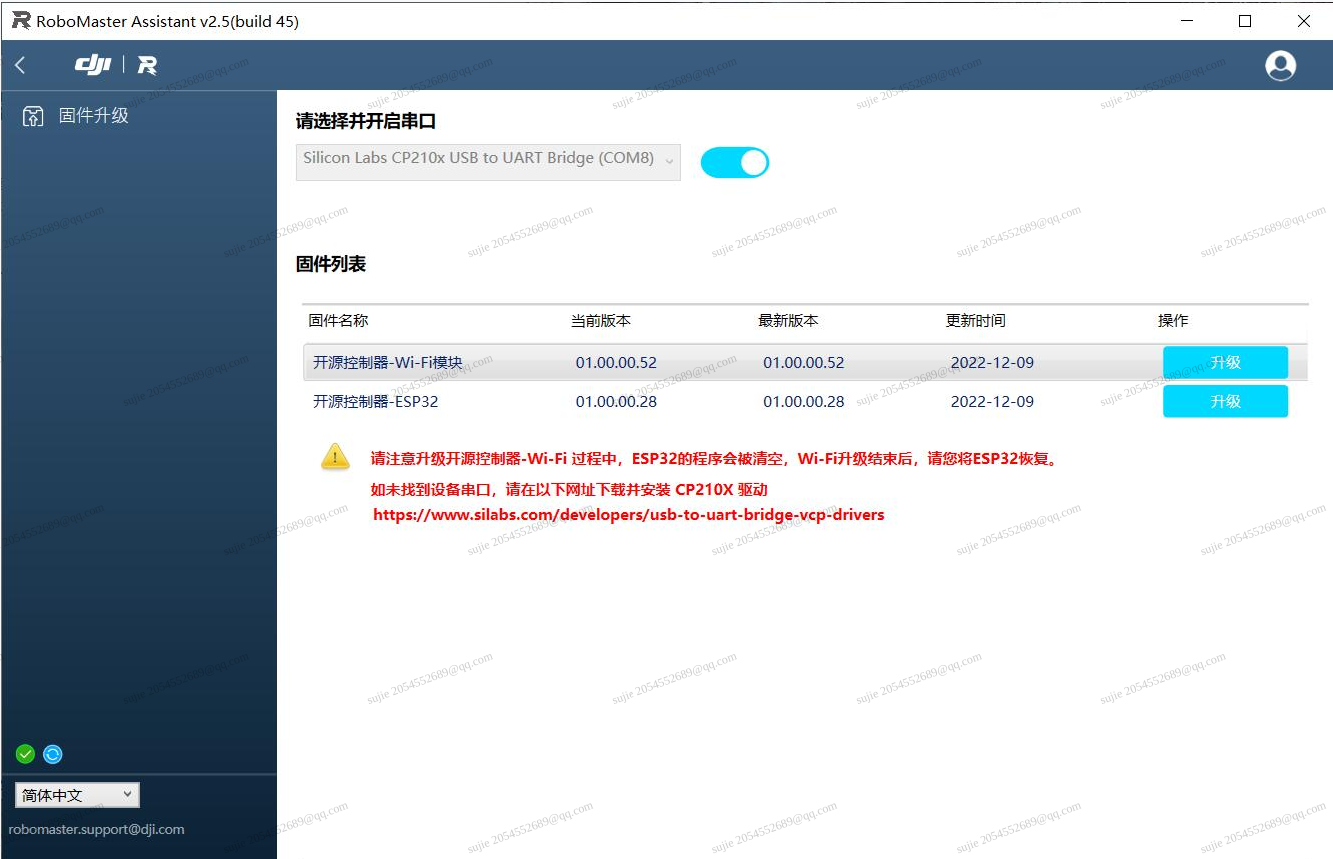
点击开源控制器 Wi-Fi 模块版本 该行的升级按钮

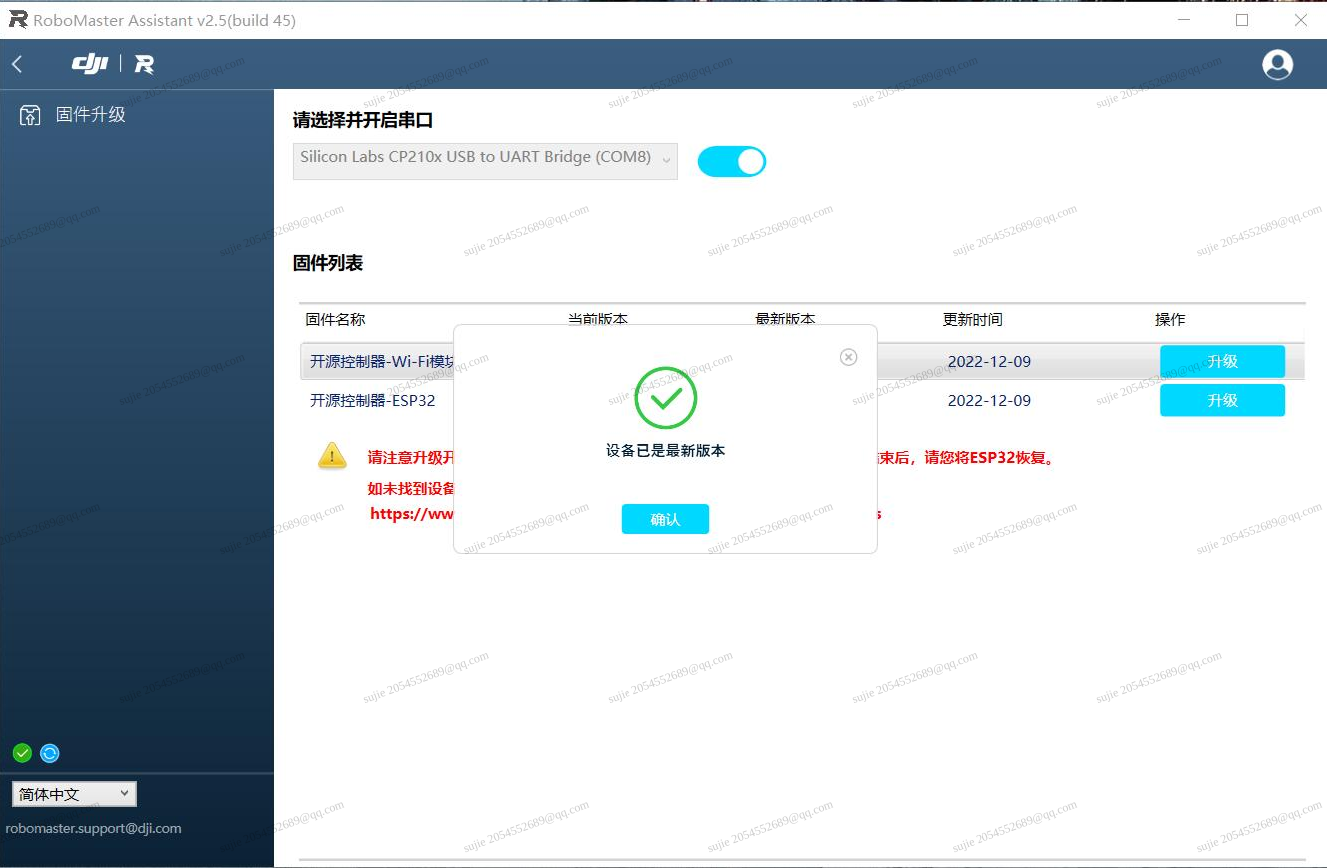
等待可升级的固件版本查询完成
等待 Wi-Fi 模块升级完成
4.2 开源控制器 ESP32 模块升级
选择 Arduino
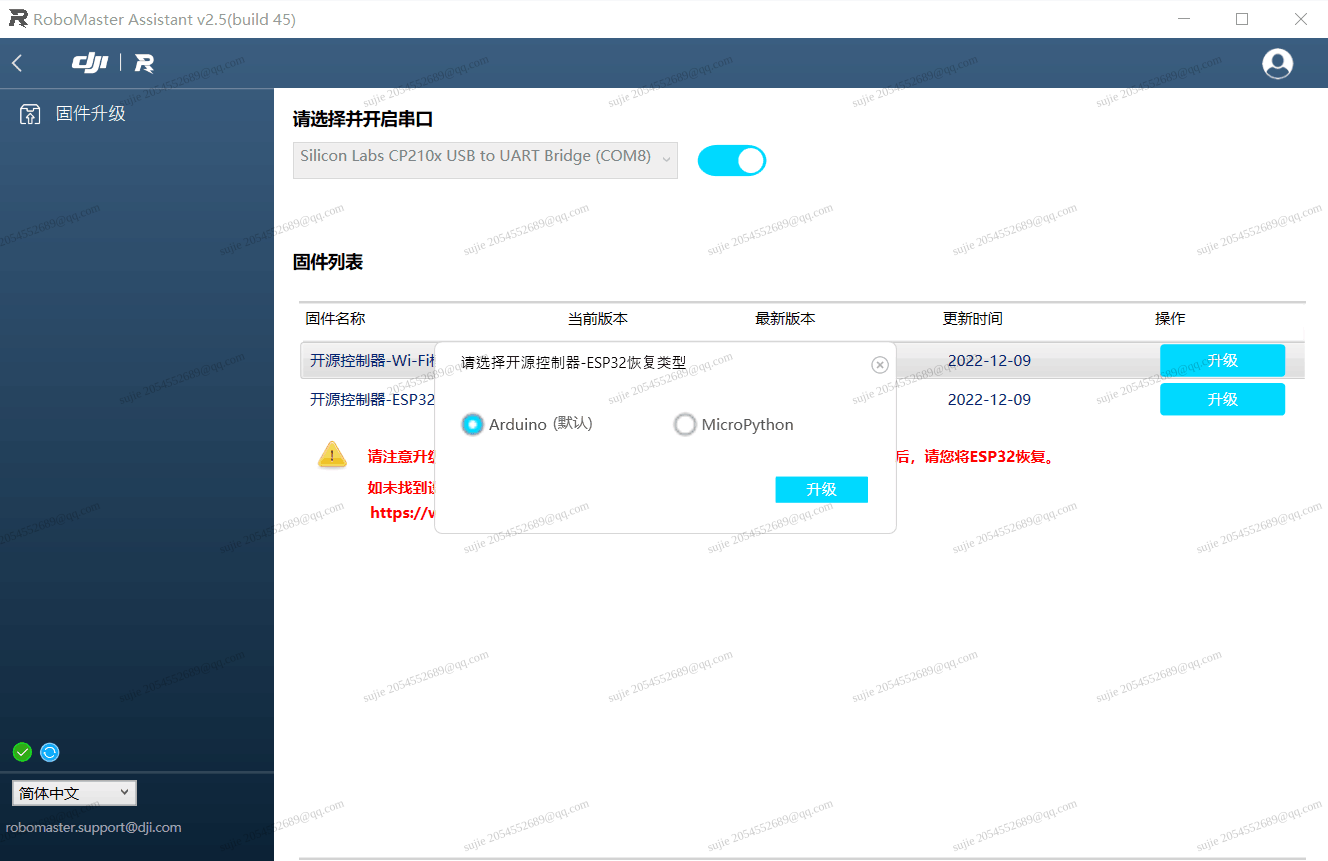
点击升级后,等待完成

等待升级完成

升级飞机固件
在手机或平板上安装 tello APP
警告
血泪教训,不要使用小、红米手机,进度会卡在 99%,不会升级成功!!!!
2.1 连接 wifi
激活 RMTT
将这个按钮拨到下面,此时开机电脑就能收到 RMTT 的 WIFI 信号,

将手机连接到以 RMTT-XX 开头的 WiFi 热点上,打开 Tello 软件
如果看到提示需要 激活 RMTT,则点击激活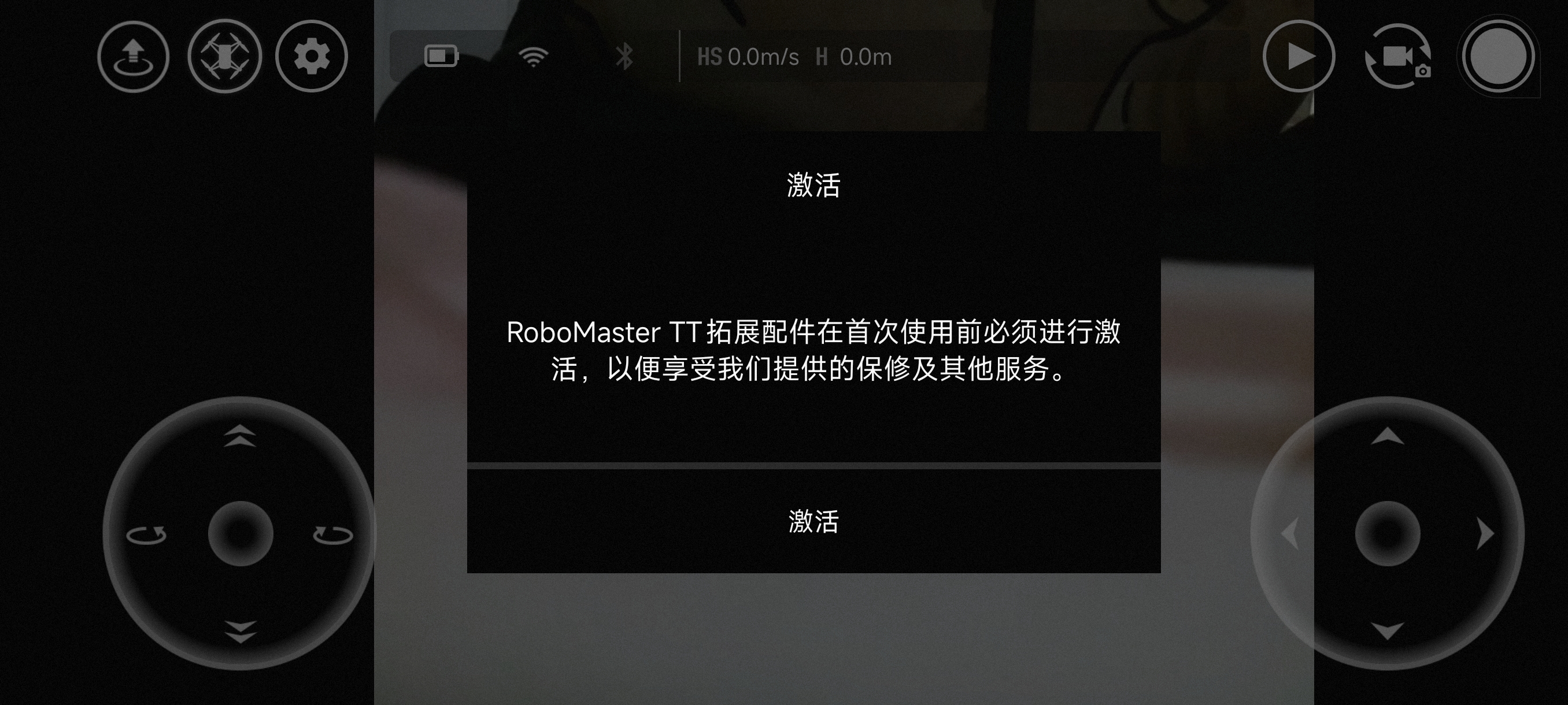
固件升级
选择更多设置

点击固件升级按钮

点击升级,等待完成即可
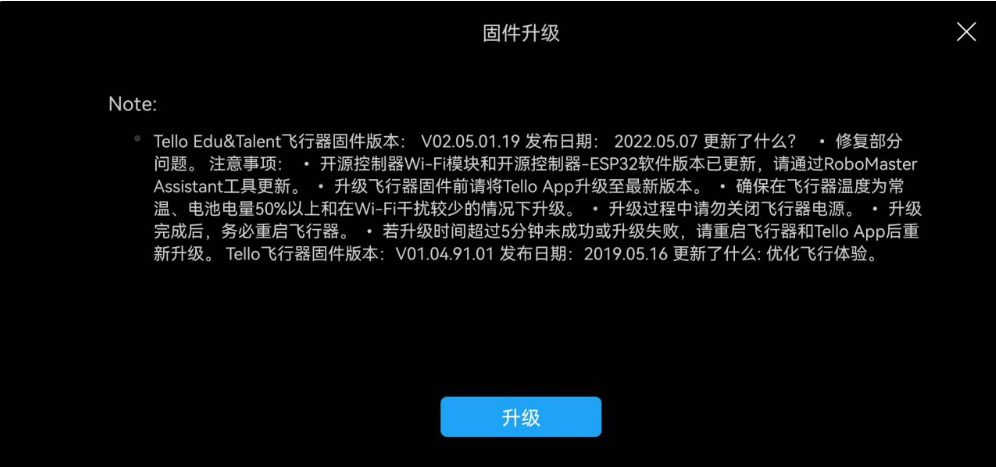
升级完成后,关机重启,再次连接飞机热点,
然后再次点击升级,若显示已是最新固件,表示升级成功