超声波测距
视频地址
目标:超声波测距使用Arduino驱动,通过MINI映射到ROS中,作为一个话题存在,把检测到的距离信息,变成话题显示在ROS中
最后实现两台MINI跟随
硬件连接
一共四个引脚
VCC,GND分别与单片机相连即可
Trig——12
Echo——13
视频中为了直接把超声波插到UNO板子中,把pin11直接给高电平作为VCC来使用
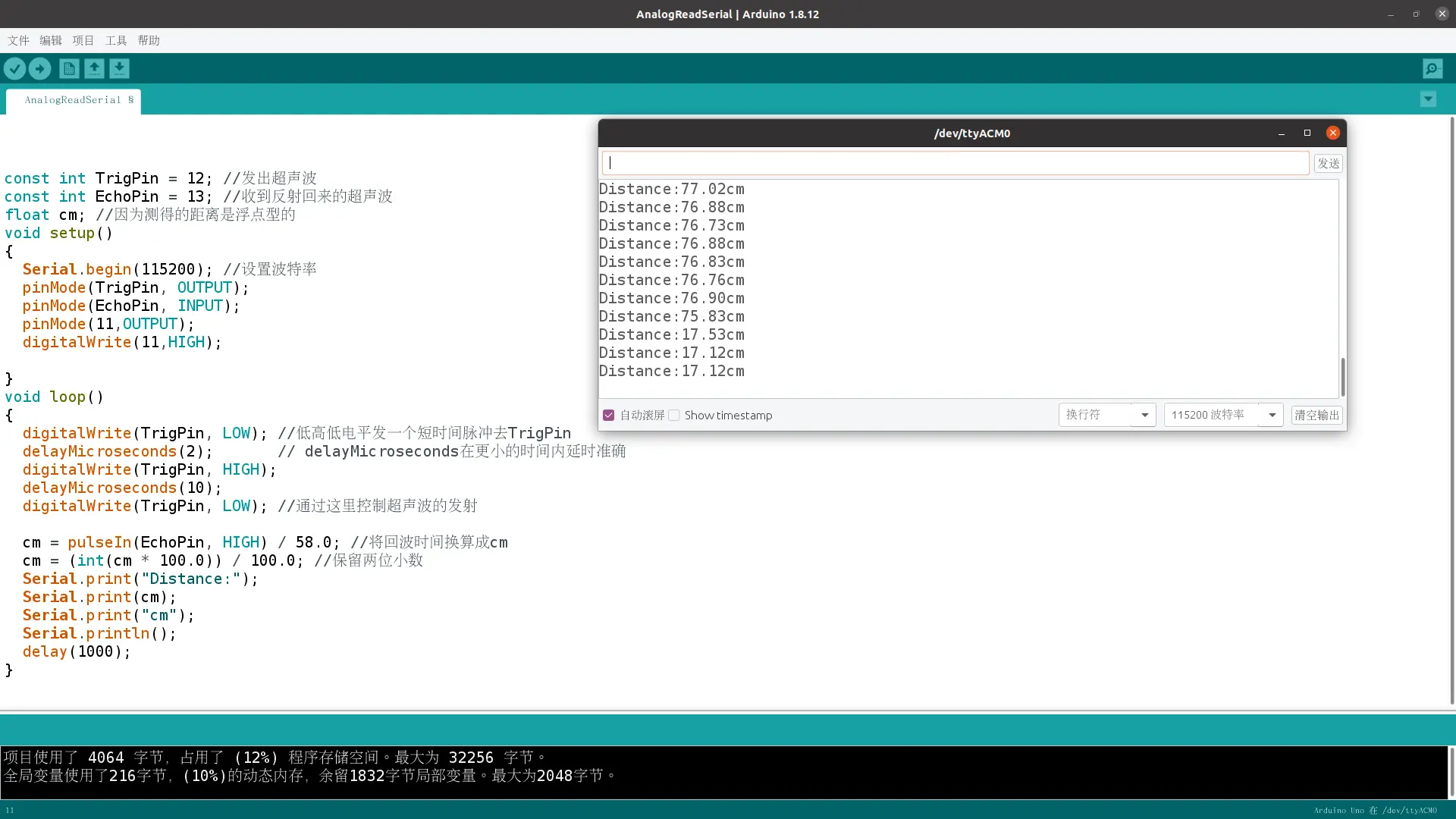
找一个UNO板子插超声波的Arduino代码
这里有需要注意的几点,找到的代码应该与超声波的型号对应,比如我的超声波型号是HC-SR04,
把引脚配置的跟我们硬件差的一样,需要单独写一个Pin11输出高电平为Arduino供电。
将波特率设置为115200
将距离数据转发到ROS话题
我们要向之前章节把灯带,Arduino,MINI直接全部连接起来,能够完成
将代码改为如下,加注释这一行

此时可以将arduino连接到MINI上面
打卡MINI,电脑连接上热点
启动机器人
shell
roslaunch tianbot_mini bringup.launchshell
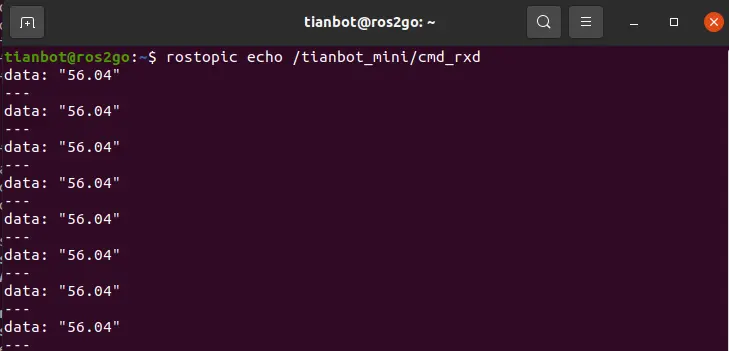
rostopic echo /tianbot_mini/cmd_rxd就可以看到MINI采集到的超声波距离
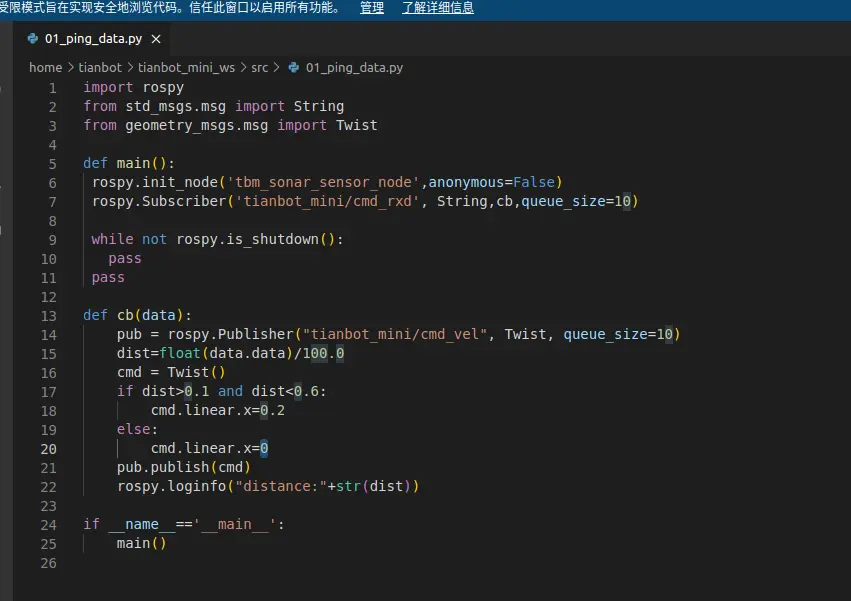
写个这样的代码
先启动小车
shell
roslaunch tianbot_mini bringup.launch在python文件所在的目录下,启动
shell
python 01_ping_data.py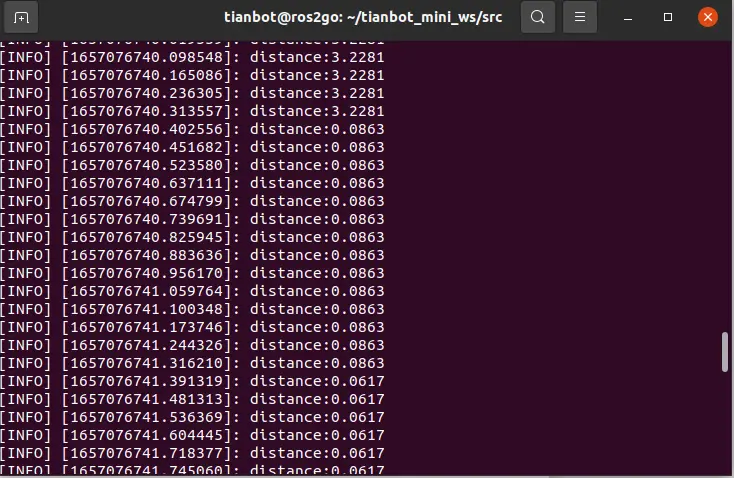
距离就开始显示,手放在超声波前就可以让小车实现跟随