Gmapping 建图
分步启动 mini 时,首先启动机器人,再启动雷达,再运行 SLAM,再启动键盘节点,机器人才能移动。直接启动一个 launch 文件即可,这是为什么呢?
我们打开直接启动的 demo_slam.launch,发现其包括了分布启动时所需要的 launch 文件:
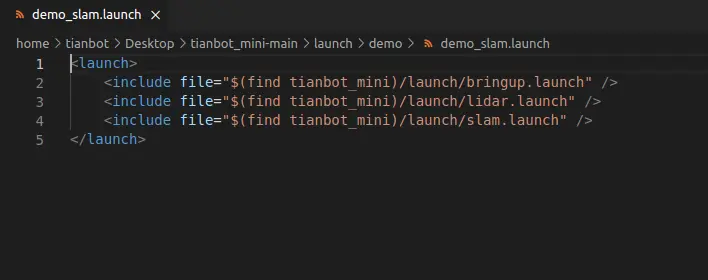
说明一个 launch 文件可以包含其他 launch 文件,直接把多个 launch 文件封装起来就可以一次启动。
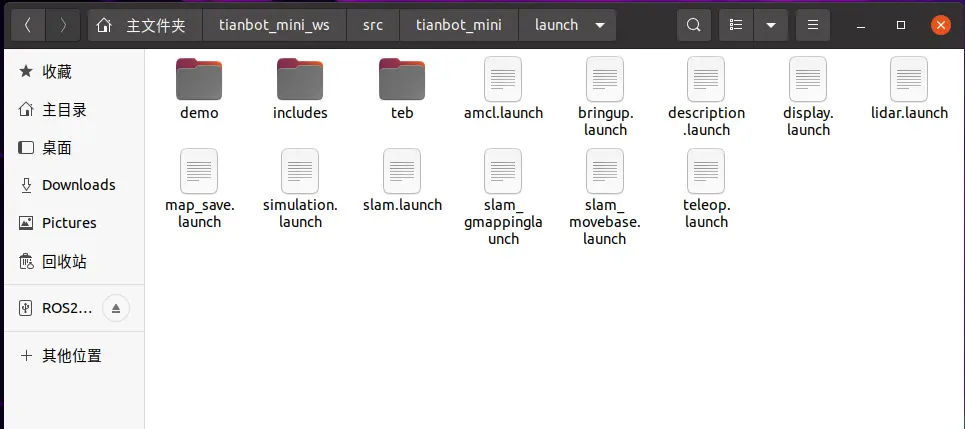
我们把 slam.launch 拆分成建图定位,导航移动,单独运行,看只有一个是什么效果
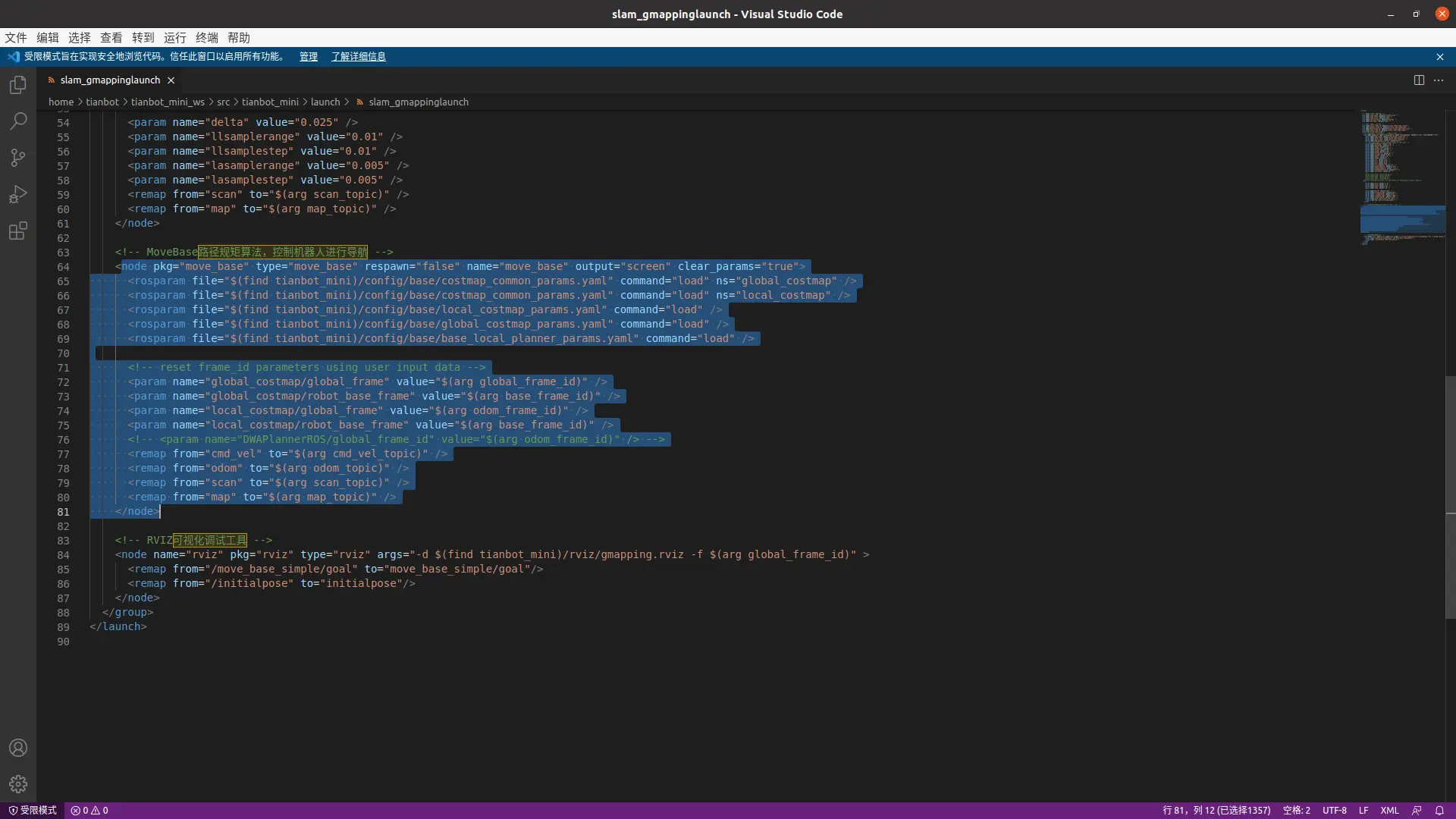
- 在 slam_gmapping.launch 中删去如图高亮的 move_base 代码。
- 在 slam_movebase.launch 中删去 Gmapping 的代码,因只需打开一次 RViz,故再删去 RViz 的代码。
开启底盘驱动
- 打开终端输入以下命令:运行迷你机器人驱动
shell
roslaunch tianbot_mini bringup.launch启动激光雷达
- 打开新终端输入以下命令:运行雷达驱动
shell
roslaunch tianbot_mini lidar.launch启动 Gmapping 算法
- 打开新终端输入以下命令:运行 SLAM
shell
roslaunch tianbot_mini slam.launch启动键盘遥控节点
- 打开新终端输入以下命令:运行键盘遥控
shell
roslaunch tianbot_mini teleop.launch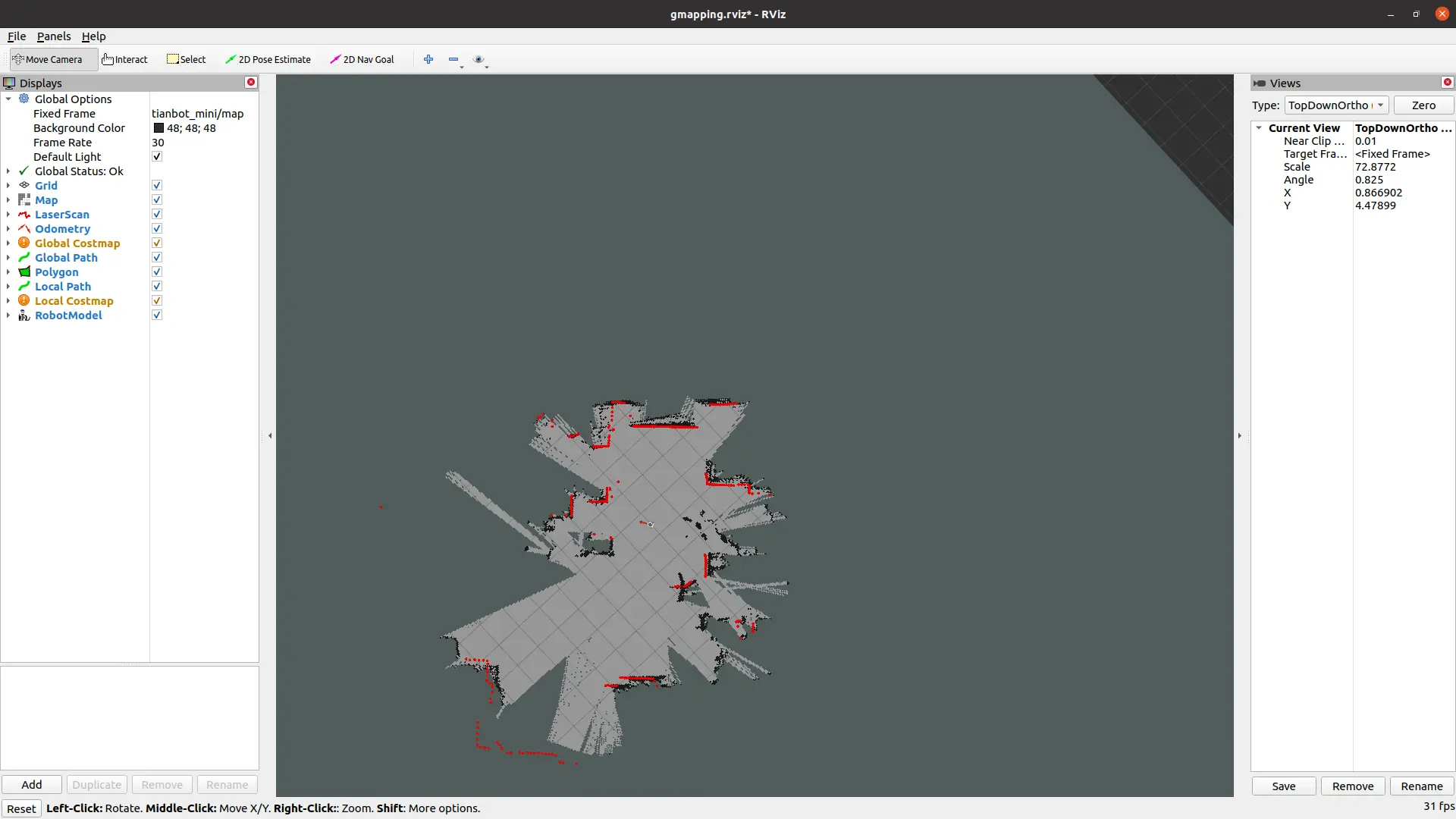
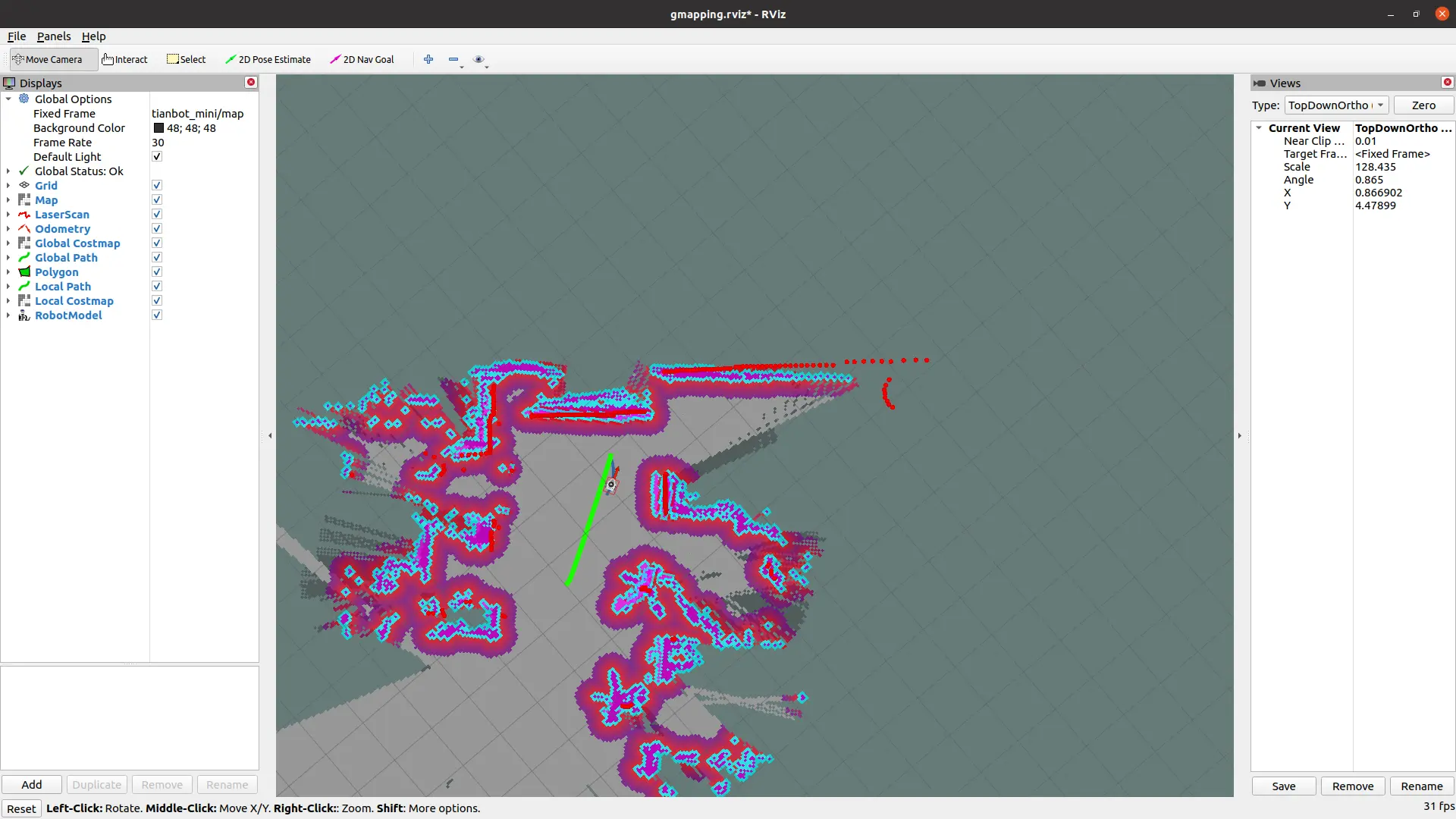
建图是没有问题的,但这个时候2D Nav Goal无法使用,机器人无法移动到目标点
再运行
shell
roslaunch tianbot_mini slam_teb.launch机器人可以运动到选取的目标点
提示
slam_teb.launch 是 Gmapping + TEB 导航的组合
通过分写slam.launch我们更深入理解到 gmapping 的建图,和 movebase 到目标点的移动。
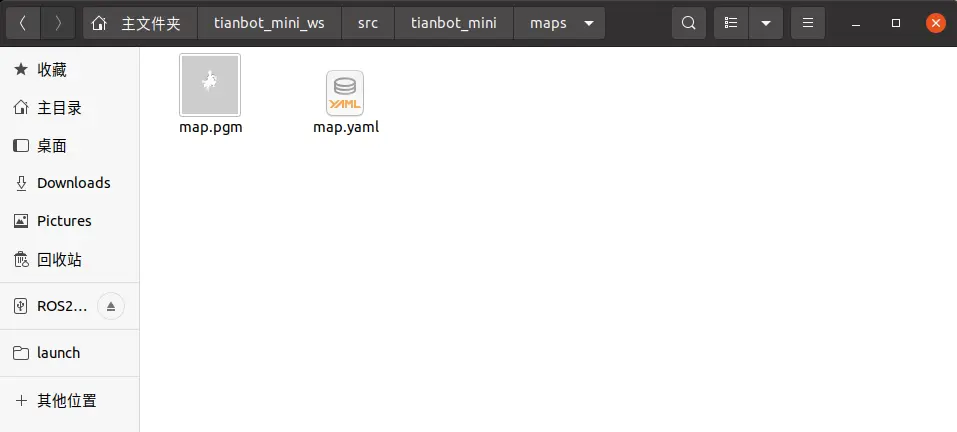
最后可以存取地图
shell
roslaunch tianbot_mini map_save.launch直接保存到
文件位置为tianbot_mini_ws/src/tianbot_mini/maps
运行保存好的地图看效果,用命令行存地图看一下
在所有终端全部关闭的情况下启动节点控制器
shell
roscore打开地图 yaml 文件
shell
rosrun map_server map_server map.yaml订阅 map
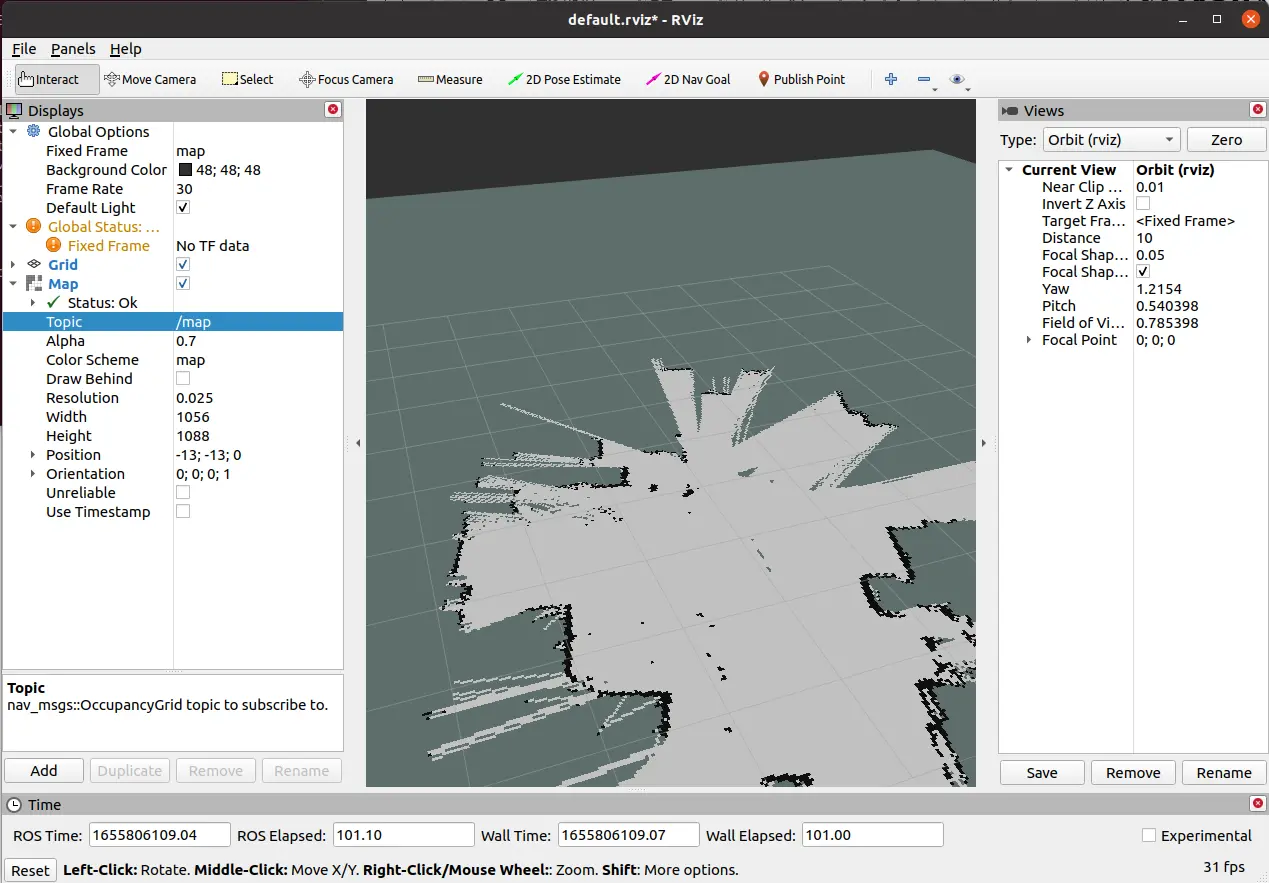
可以发现,保存好的地图文件打开了。