可视化工具rviz的使用
视频
概要:
在RViz中观察机器人里程计信息,和机器人模型与里程计信息的结合。
正文:
提示
- Rviz为可视化工具,是让数据可视化。
- 而Gazebo是用于模拟真实环境生产数据,是用来产生数据的。
打开终端启动机器人
shell
roslaunch tianbot_mini bringup.launch打开终端启动RViz
shell
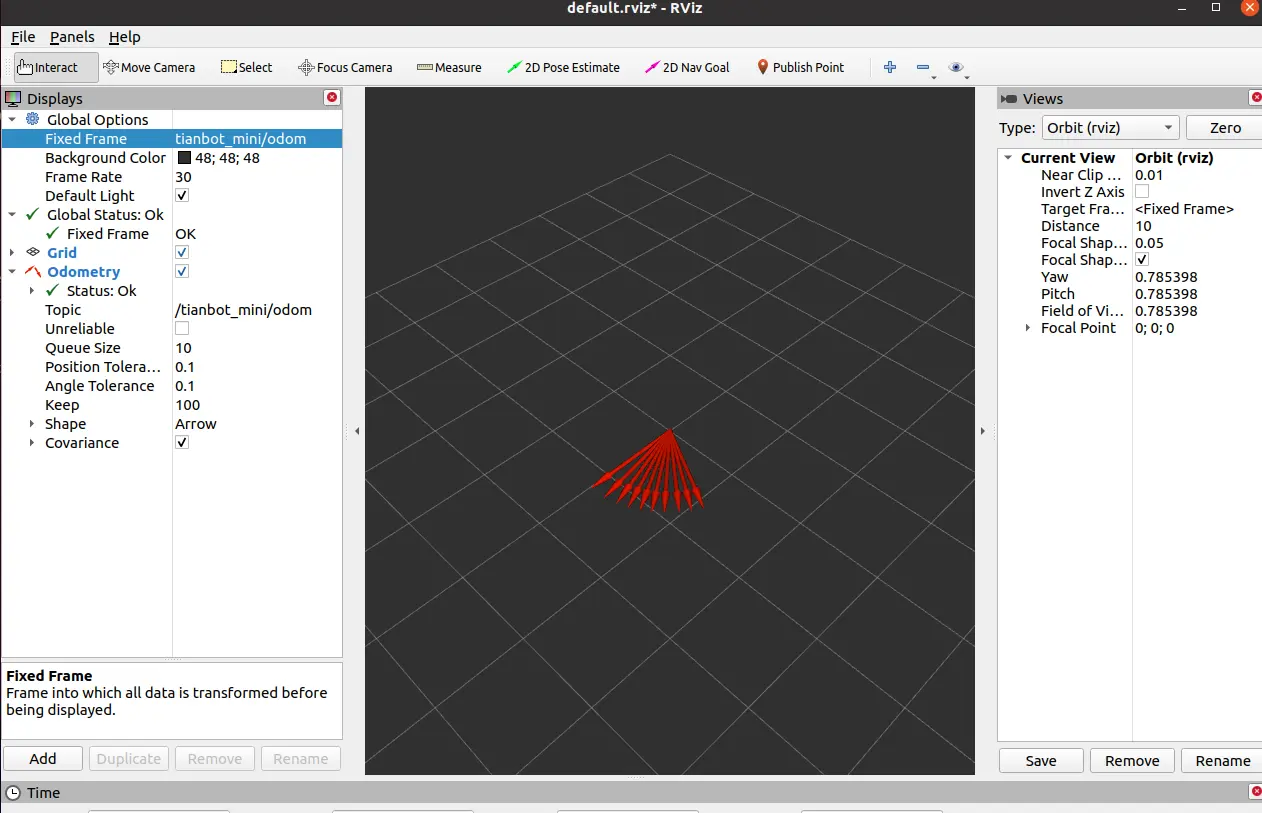
rviz添加 Add odometryFixed Frame选用tianbot_mini/odom,移动机器人,会有下图的效果。
再添加机器人模型 Add RoboModel
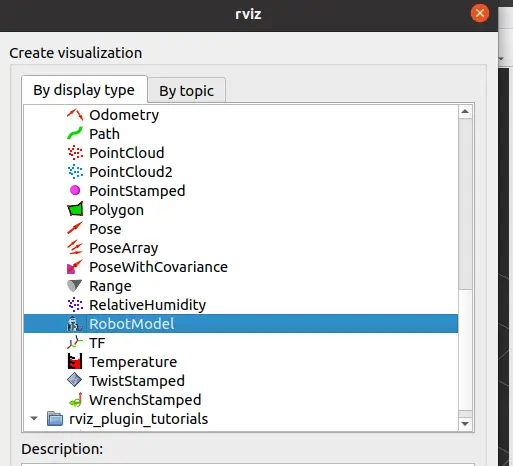
此处如果报错,请在robot_description处添加tianbot_mini
