常见问题
如何查看自己的 ROS2GO 版本
v20241019以后发布的版本已经内置fastfetch
下载安装
fastfetch:https://github.com/tianbot/tianbot_docs/releases/download/fastfetch-latest/fastfetch-linux-amd64.deb打开终端后运行如下命令即可
fastfetch -l none默认用户名和密码是什么
- 用户名:
tianbot - 密码:
ros
如何切换 ROS1/ROS2 运行环境
切换到 ROS1:
source $(ros2go_switch -v 1)切换到 ROS2:
source $(ros2go_switch -v 2)如何切换中英文输入法
使用Ctrl+ 空格切换输入法,当处于搜狗输入法下,按下shift键切换中英文输入
如何在 ROS2GO 20.04 中安装 ros2 humble 的其他依赖包?
不要直接使用apt安装,如下图所示:
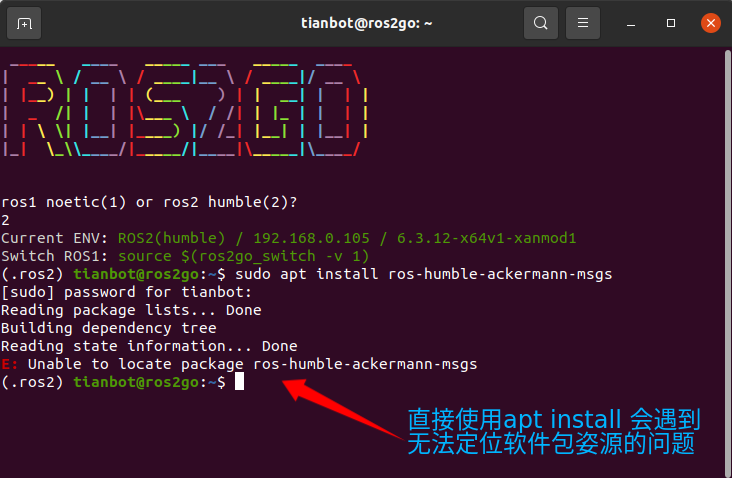
正确的安装方式是:
在(该工作空间命名可自拟)humble_patch_ws/src 目录下,git clone 拉取该功能包的源码到工作空间 src 文件夹中,编译后再 source 该工作空间,即正常可使用
mkdir -p humble_patch_ws/src
# 将https://github.com/YYYY/XXXX.git 替换为需要的功能包的 git 地址
# -b ros2 替换为需要的分支
git clone https://github.com/YYYY/XXXXX.git -b ros2 humble_patch_ws/src/XXXX
cd humble_patch_ws && colcon build --merge-install
source humble_patch/install/setup.bash之后即可正常使用 humble 版本下的该功能包
提示
- 每次需要用到该功能包时,都需要重新
source humble_patch/install/setup.bash才能正常使用 - 如果想要在每次打开终端时自动
source humble_patch/install/setup.bash,可以考虑在~/.bashrc文件中source $(ros2go_switch -v 2)后面添加
source humble_patch/install/setup.bash --extend如何更新 QQ
请查看腾讯 QQ Linux 版官网说明进行操作:https://im.qq.com/linuxqq/support.html
为什么看视频没声音
首先你需要确定一下,
- 你的电脑上是否安装了声卡
- 你的声卡是可用的
如果你在 Windows 上使用时可以听到声音,但是在 Linux 上没有声音,那么很可能是 Linux 驱动不兼容。 因为 linux 官方为了兼容市面上多数的声卡,发布的是通用驱动,但对于部分厂商魔改过的声卡,显然则采用公版驱动无法正常驱动声卡,这同时也会影响到麦克风的正常工作。
ROS2GO 是基于 linux 内核和 Ubuntu 打造,所以也是一样的。通常 ubuntu 系统的长期支持版,如 ubuntu20.04,其硬件驱动会落后最新的 linux 硬件驱动 1~2 年,在 ROS2GO 中,我们采用了 linux 更新最快、最为活跃的 oem 内核系列,以保证用户体验,但仍然无法做到十全十美。
解决方法
目前有一个硬件上的解决方法,就是通过听说一体的 USB 声卡 (淘宝上可以买到)+听说一体的有线耳机(目前智能手机的原装耳机一般都是可以的)
- 问:那为什么直接将有线耳机插在电脑上不可以呢?
- 答:大体上的逻辑是这样的,有线耳机只能充当输入输出设备,本身不能处理模拟输入的声音信号,集成了音频处理芯片的 USB 声卡(或某些拓展坞 hub)能够处理声音信号。所以,需要通过耳机连接 USB 声卡(或带有声卡的拓展坞 hub),然后再将 USB 声卡(或这种拓展坞 hub)连接电脑,就能够正常识别麦克风和扬声器设备了。
在部分电脑上无法正常关机?
解决方案
很多人会出现,电脑黑屏后,很长时间没有反应,此时不要过于担心,粗暴的方法就是按住开关键,强制关机,不影响恢复,当然这种情况很少发生,但是千万不要在关机途中进行强制断电,拔掉 ROS2GO 等操作 目前这个问题在部分电脑上比较常见,目前有两种方式:
直接强制关机 即:按住电源键直接断电,经过长时间的测试,不会出现什么问题
软重启通过 Windows 关机 使用软重启按键:
Ctrl + Alt + PrtScSysRq,松开PrtScSysRq键,然后在按住Ctrl+Alt键之后,依次按下r,e,i,s,u,b。切换到 Windows,再关机
ROS2GO 三不要操作
很大一部分兼容性问题(99% 以上),主要是因为电脑与 Ubuntu 的兼容问题,这个问题可以善用搜索的方法,先在搜索引擎上搜索相关问题。
- 不要在使用中直接拔掉 ROS2GO
- 不要随意修改根(/)目录下的文件
- 不要轻易改动预置 NVIDIA 驱动
系统文件相关和软件版本
| 版本 | 操作系统及版本 | ROS 版本 | 总容量 | 系统占用说明 |
|---|---|---|---|---|
| P64 | Ubuntu 18.04 + Melodic | Melodic | 64GB | 资料盘 10GB,根分区空余约 40GB |
| P128 | Ubuntu 20.04 + Noetic,Humble | Noetic,Humble | 128GB | 资料盘 10GB,根分区空余约 100GB 可定制更大容量 |
配套课程相关
目前有:古月出品《ROS 机械臂开发实战》、田博出品《ROS 移动机器人开发实战》等
观看方式:打开终端输入:
ros2go_video稍等几秒钟即可打开默认浏览器查看在线课程观看时限:从首次浏览在线课程开始算起,三月内有效
无法启动提示任意键继续
error: (hde, gpt1)/vmlinuz has invalid signature
error: you need to load the kernel first
按任意键继续 or press any key to continue 这个提示一般都是没有关闭安全启动 Secure Boot,只需在 BIOS 中关闭掉即可正常启动
这个提示一般都是没有关闭安全启动 Secure Boot,只需在 BIOS 中关闭掉即可正常启动
进入 ROS2GO 后没有 WiFi
网卡型号实在太多了,同时厂家会定制奇怪型号的网卡,ROS2GO 无法保证所有网卡都支持,请查阅兼容列表中网卡型号支持,检查一下是否支持您的 WiFi 型号,如果无法识别网卡首先查看是否关闭 Secure Boot 或者更换内核启动查看是否可以正常驱动,如果还是无法正常驱动,可以试试以下方法
手机连接电脑,使用手机自带的 USB 网络共享功能,本条经测试苹果和安卓手机都是可以使用的,具体方法可以搜索查看
购买一个 USB 接口的 WiFi 适配器
- ROS2GO 系统终端输入:
lspci | grep -i network将结果反馈给售后群,我们工程师会视情况给出解决建议
无法访问原来的 Windows 下的硬盘
这是一个使用双系统时常见的问题,最常见的原因是没有关闭 Windows 的快速启动,这样 Windows 并不是完全正常的关闭,了解问题可参考这个链接,修复此类问题:Error mounting /dev/sda2,使用命令
sudo ntfsfix /dev/sda2设置打不开,闪退
早期版本 ROS2GO 缺少pipewire包,安装即可:sudo apt install pipewire,v20241019版本之后已修复这个问题
如何将系统安装到硬盘上
理论上是完全可行的,但这属于高危操作,如果有时间可以自己折腾,天之博特公司不做任何技术支持保证。具体可以参考 CSDN 用户"静精进境"的文章ROS2GO 与 WIN10 双系统安装。
请一定注意,对本机进行任何安装系统或者类似磁盘操作之前请备份重要数据,备份备份再备份!
如何进行远程控制,是否可以安装 VNC 等远程软件?
很多初学者在操作实际机器人时,希望可以用远程桌面进行操作,但是请不要在 ROS2GO 上安装 VNC,已经有安装 VNC 导致无法进入桌面或者显示问题的案例,如果需要远程控制,可以使用系统内的 Remmina Remote Desktop Client,选择 VNC 的模式连接即可,同时我们也推荐使用国产优秀软件Todesk
我是企业用户,能定制么?
ROS2GO 为企业提供软硬件客制化方案,定制包含不仅限于:容量、LOGO、默认用户信息、随盘资料、驱动支持、软件包、桌面背景等,如您有需要,请联系在线客服,我们会有专人为您解答。