配置WIFI环境
章节介绍
本章节讲解如何控制多机器人的移动。
如果您有两台机器人可以直接控制两台机器人,如果您只有一台机器人,也可以与仿真联动,实现实体与仿真之间的联动。
B站ROS零基础入门百日谈15
多机模式
机器人正常开机,电脑连接机器人的WIFI
在浏览器192.168.1.1/cfg
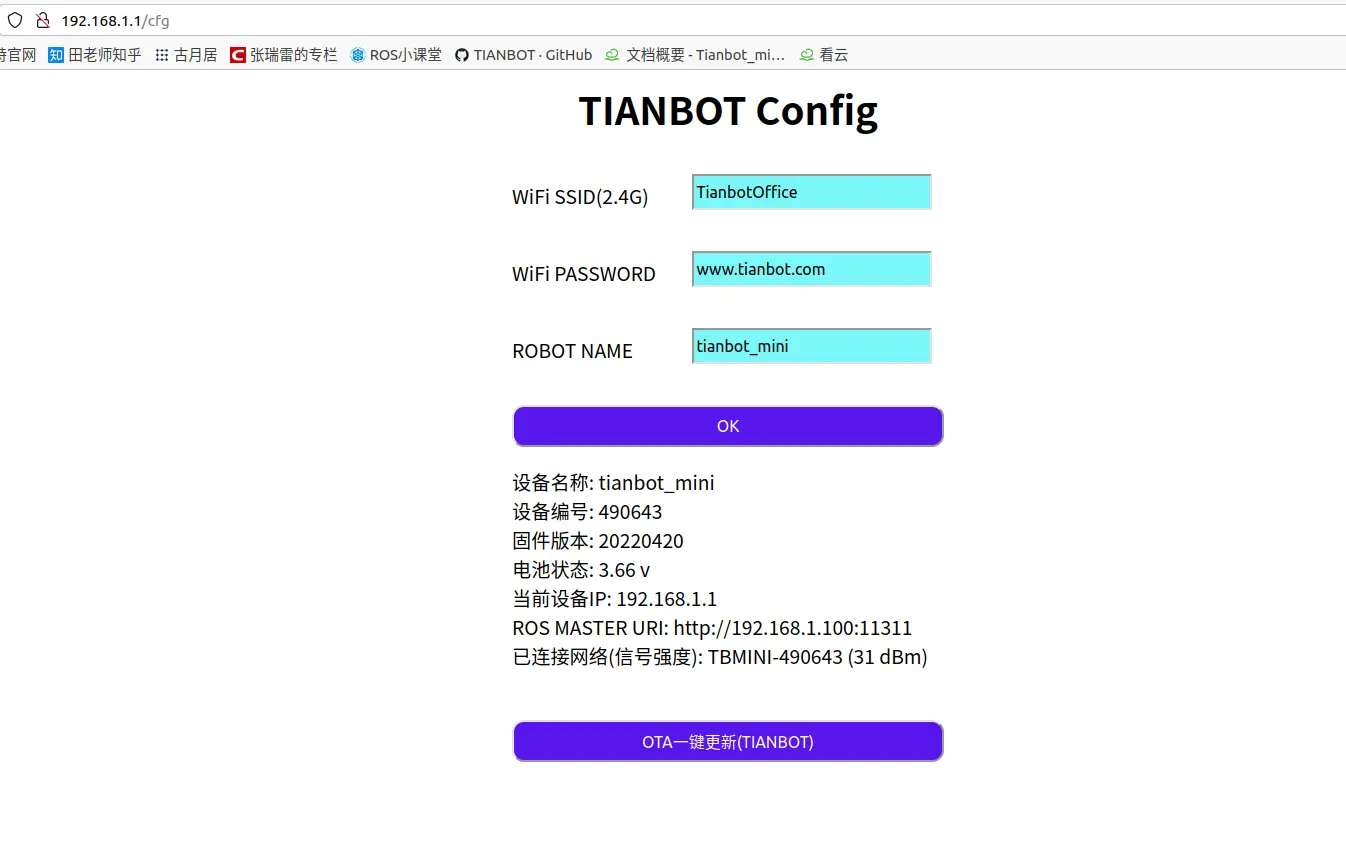
注意WIFI仅支持2.4G的!!
点击OK 
按照如图所示的操作,当机器人亮起蓝灯则成功。
但机器人过会就会亮起红灯,还需有一个RMIP的配置,也就是ROSMaster URI。
电脑连接路由器WIFI,要和机器人同一个路由器信号,也就是上图的WIFI SSID名称相同。
查询电脑IP:
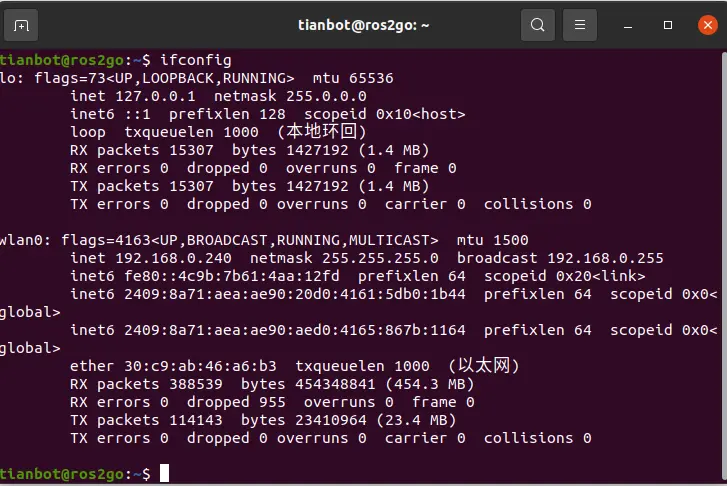
在连接路由器WIFI下打开网址tianbot_mini.local/cfg

如图我的IP是192.168.0.240(每台电脑都不一定一样),输入ROS MASTER URI后点击OK,此时机器人就会变为蓝灯。
机器人就已经进入多机模式了。
当下次开机时,如果要使用多机模式,按照如下操作:
关机状态下,长按WIFI按钮,同时长按开机按钮,机器人开机亮蓝灯则进入多机模式。