机器人集群
本篇介绍RMTT与Tianbot_mini之间的集群
硬件准备
- 两台Mini
- 路由器
配置多机模式
如果您的MINI未配置过多机,参考多机器人联动的章节配置WIFI环境,第二台机器人多机模式的配置等相关内容
提示
改名字的时候,名字改为tbmn_01,tbmn_02后续会少很多麻烦
如果您的MINI已经配置过多机,建议您先别进入多机模式,先进入热点模式,电脑连接到MINI的热点后
进入192.168.1.1/cfg 把您的MINI名字分别改为tbmn_01,tbmn_02,避免后续调试过程中的麻烦
关机状态下,长按WIFI按钮,同时长按开机按钮,机器人开机亮蓝灯则进入多机模式
两台机器人都进入多机模式后
分步启动MINI
shell
source ~/tianbot_mini_ws/devel/setup.bash
roslaunch tianbot_mini bringup.launch robot_name:=tbmn_01
roslaunch tianbot_mini bringup.launch robot_name:=tbmn_02
roslaunch tianbot_mini display.launch
roslaunch abc_swarm add_robot.launch robot_name:=tbmn_02发布TF变换
两台MINI联系要有坐标静态变换,由world坐标系向两台的odom坐标系变换
shell
rosrun tf static_transform_publisher 0 0 0 0 0 0 world tbmn_01/odom 20
rosrun tf static_transform_publisher 0 0 0 0 0 0 world tbmn_02/odom 20打开Rviz
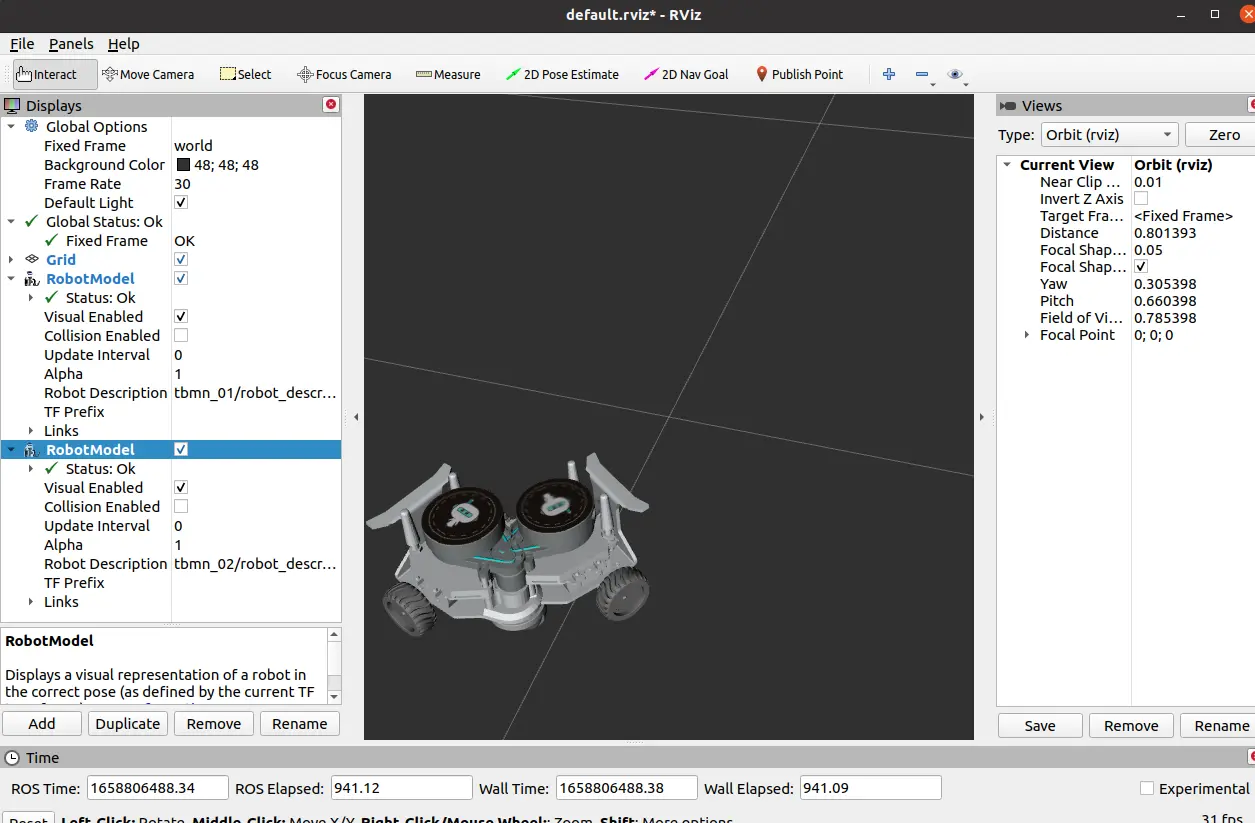
此时移动MINI,Rviz中的模型也会跟着移动(轮子要转,使用的是odom)
一步启动MINI
shell
source ~/tianbot_mini_ws/devel/setup.bash
roslaunch abc_swarm demo_two_robots.launch通过调试接口设置里程计
shell
rostopic pub /tbmn_01/cmd_dbg std_msgs/String "data: 'setodom 0 0'"
rostopic pub /tbmn_02/cmd_dbg std_msgs/String "data: 'setodom 0.6 0'"