使用环境配置
1、ROS2GO 启动电脑
TIANBOT 迷你机器人来说附带的 ROS2GO 随身系统已预置当前版本固件所匹配的功能包,目前搭配的 ROS2GO 系统为 Ubuntu18.04+ROS melodic 版本,使用 ROS2GO 中启动系统,简单来说只需要 3 步:
- 将 ROS2GO 插入 USB3.0 端口,开启电脑
- 按下快捷键进入 BIOS 设置页面,在 BOOT 启动项中选择
TIANBOT ROS2GO - 开始 ROS2GO 之旅
本手册主要讲解迷你机器人使用,如需 ROS2GO 更详细的介绍和使用,可以点击ROS2GO 使用手册查看。
注意
ROS2GO 必须正常关机后才能拔出,直接拔出会损坏系统。
2、启动迷你机器人--单机模式
在首次迷你机器人使用之前,我们需要将上面使用 ROS2GO 启动的电脑连接迷你机器人的热点(热点名通常为TBMN_XX)上即可使用。
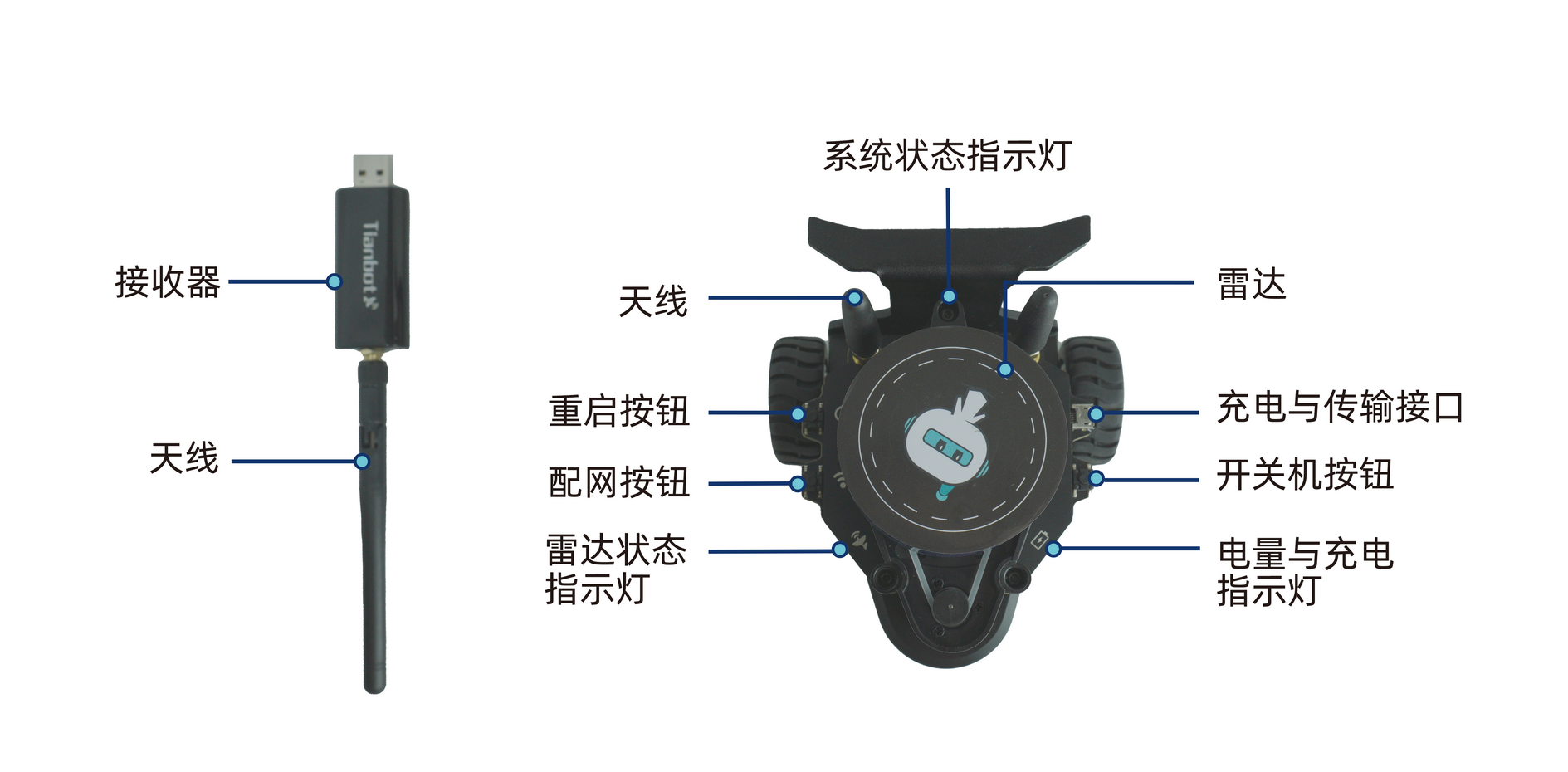
- 长按电源按钮 3 秒,蜂鸣器响起,激光雷达转动,系统状态灯黄灯闪烁,此时设备进入热点模式。
- 热点模式持续 30 秒,迷你机器人会创建 TBMINI-XXXX 热点,该热点未加密,我们使用电脑连接该热点,系统状态指示灯变为绿色。
注意
TBMINI-XXXX 热点相当于 2.4G 频段,如果周边同频段比较多,可能会干扰。 热点模式持续 30 秒黄灯快闪没连接到,重新按照教程再次操作即可。 热点模式只支持一个客户端链接到此热点。 TIANBOT MINI 机器人长按关机键即可正常关机
3、开始 SLAM--单机模式
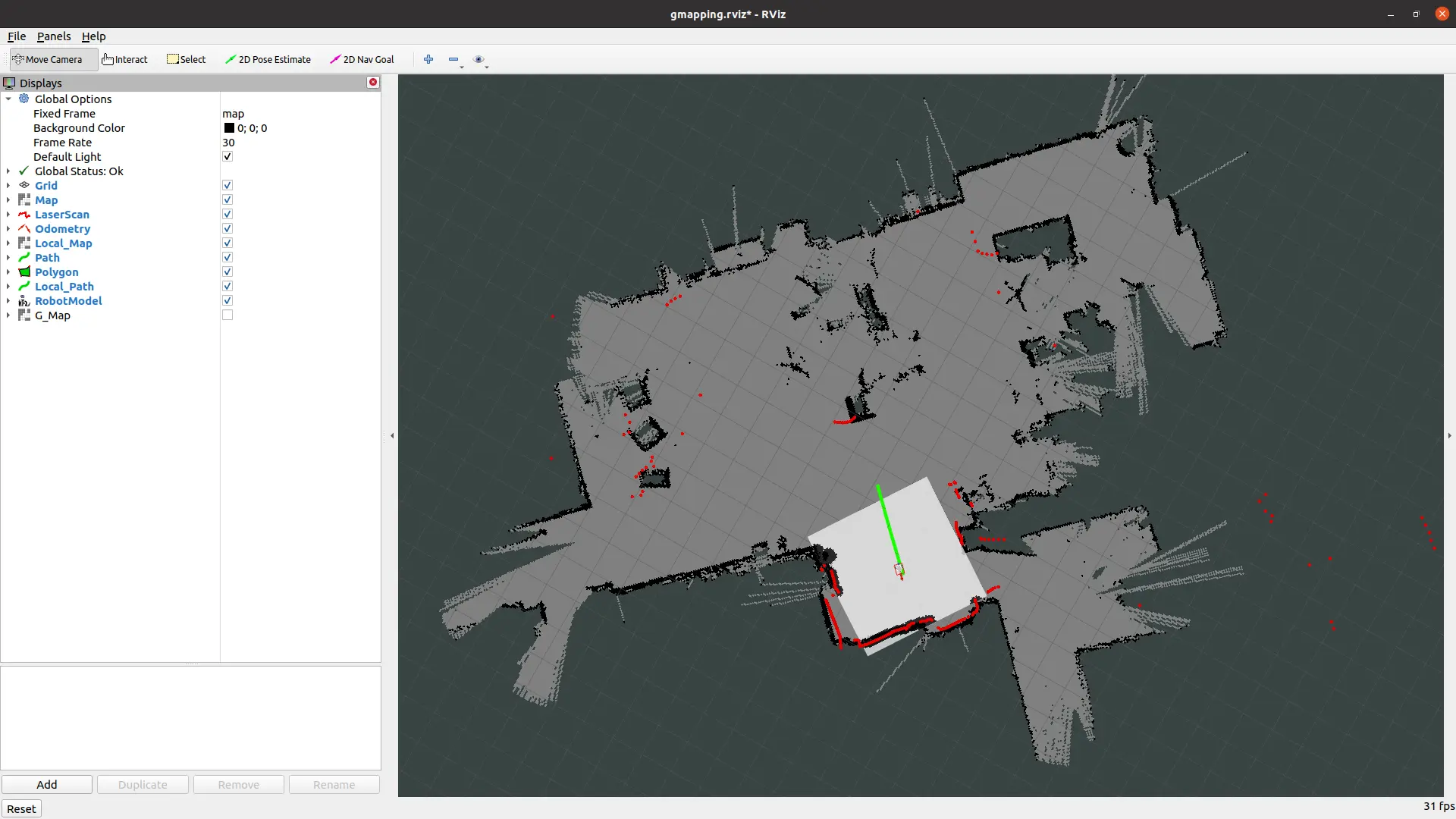
迷你机器人 ROS 功能包已随车预置,电脑连接热点后,将接收器也插入同一台电脑上,确保雷达指示灯红蓝灯常亮和系统状态指示灯绿色长亮,此时已连接正常开始建图导航测试。
如果已经熟悉 ROS,可以打开终端一次运行所有节点直接 SLAM,在地图上点击 2D NAV Goal,可以边走边建图,无须使用网页遥控,
shell
roslaunch tianbot_mini demo_slam.launch