使用指引
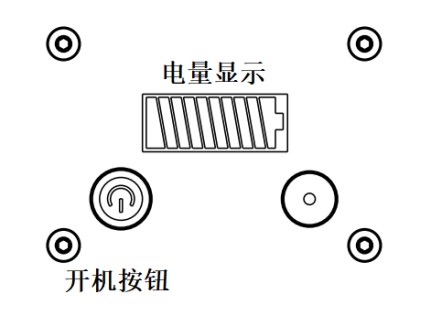
如何开机
提示
注:开机前确认急停开关处于解锁状态。 车辆失控时请及时按急停开关,急停开关按下后整车电机断电,不影响上位机,遥控等设备供电。
整机工作时整体功率比较大,在使用之前请查看电量是否足够,如果电量不够请充电后再进行使用。
- 长按电源按钮听到提示音后松手,整机上电;
设备关机
- 长单电源按钮听到提示音后松手,整机断电;
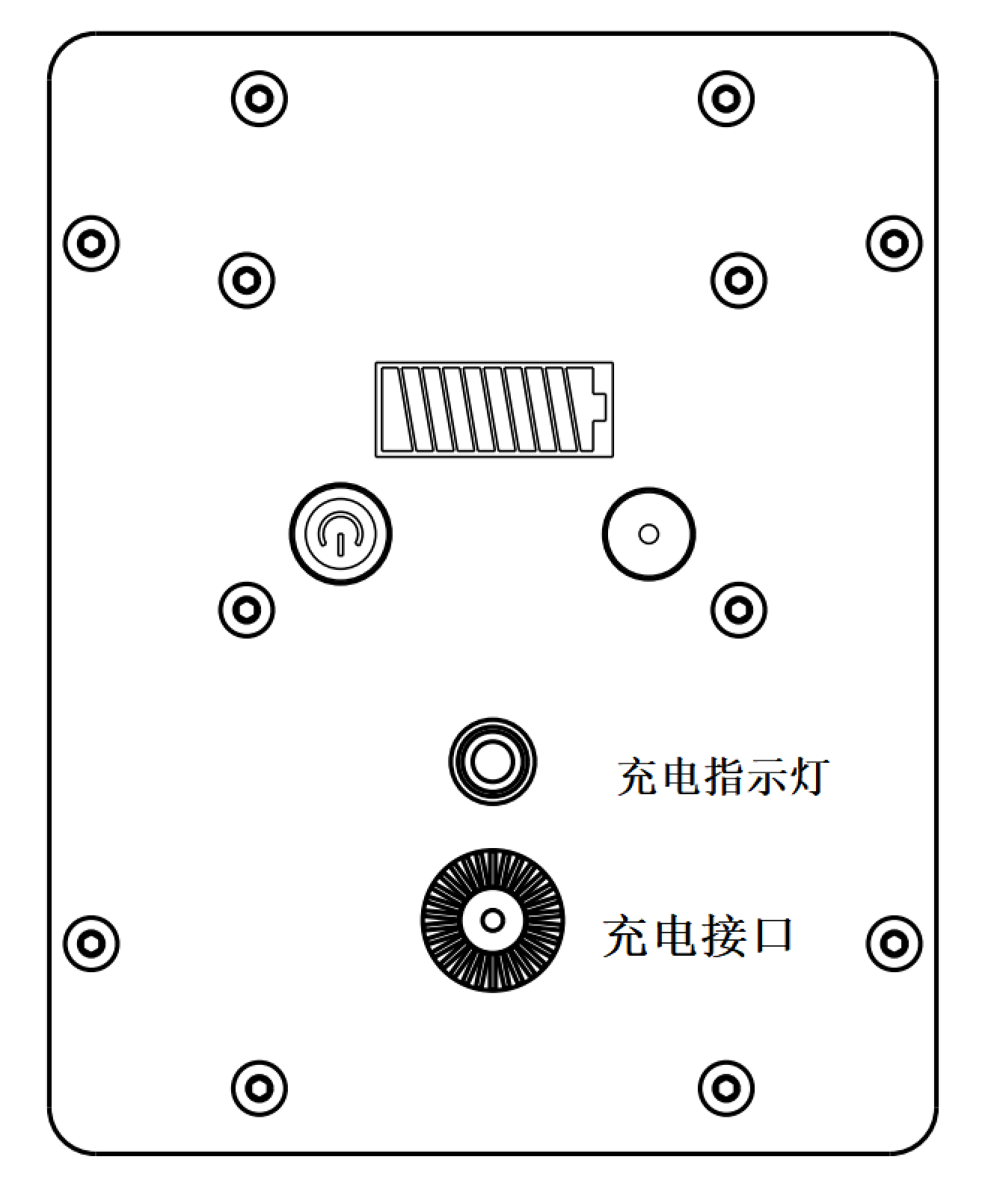
如何充电
本产品使用的智能电池是一款容量为20AH、电压为24V,采用高能电芯,并使用先进电池管理系统的智能电池,不正确地使用、充电或存储电池可能会导致火灾或物权和人身伤害!务必参照以下安全指引使用电池。
首次使用智能电池前,请务必将智能电池电量充满,充电时必须使用附带提供的专用充电器进行充电,使用非TIANBOT提供的电池充电器而引发的事故,TIANBOT概不负责。
- 充电时请将产品放置在周围无易燃、可燃物的地面。充电过程,请务必保持有人员在附近,以防发生意外。
- 禁止在使用结束后立即对电池进行充电。此时电池处于高温状态,强制充电会对电池寿命造成严重损害。建议待电池降至室温,再进行充电。理想的充电环境温度(5℃ - 40℃)可大幅度延长电池的使用寿命。
- 在充电状态下充电指示灯将会绿色呼吸闪烁,充电指示灯蓝色常亮表示电池已充满,此时请取下充电器,成充电过程约需7个小时。
- 电池每经过 10-15 次充放电后,需要进行一次完整的放电和充电过程(将电池充满电,然后放电至电量为0% 或电池自动关闭,再充满电)以保证电池工作在最佳状态,否则电池电量显示可能不准确。
- 充电完毕后请断开充电器与电池间的连接。定时检查并保养充电器,使用充电器前检查插头等各个部件,切勿使用酒精或者其它可燃剂清洁充电器。切勿使用已损坏的充电器。
- 插入充电器后充电指示灯未亮绿色呼吸灯,红色慢闪时请及时拔出充电接口并检查充电器输出是否正确,当充电指示灯红色快闪时请及时拔出充电接口并及时联系天之博特技术支持。
无线遥控
机器人有两种操作模式:遥控模式和ROS模式,三种运动模式,根据场景需求,在遥控模式下我们可以通过拨动遥控器右手侧拨码(三档开关)选择不同的运动模式;在ROS模式下,可以通过键盘按键来进行运动模式的切换。 遥控模式:利用遥控器手动操控机器人,简单方便,开机即用,适合演示与调试、SLAM建图等 打开遥控器电源开关,可通过遥控器操控机器人,遥控器关闭时,整车处于锁定状态或者ROS操控模式,各功能实现如下:

遥控器 | 拨码 | 说明 |
|---|---|---|
 左拨码(左三档开关) |  | |
 右拨码(右三档开关) |  | 当处于位置-1,为全向模式,可以控制火星车进行横平移运动。当处于位置-2(默认),阿克曼模式。当处于位置-3,切换到旋转模式,可以遥控控制火星车原地旋转。 |
| 左回中摇杆 | 右拨码位于-1位置 | 遥控控制机器人速度(前后) |
| 左回中摇杆 | 右拨码位于-2位置 | 同上 |
| 左回中摇杆 | 右拨码位于-3位置 | 同上 |
| 右回中摇杆 | 右拨码位于-1位置 | 遥控控制机器人轮子转向(左右) |
| 右回中摇杆 | 右拨码位于-2位置 | 同上 |
| 右回中摇杆 | 右拨码位于-3位置 | 遥控器机器人逆时针或顺时针旋转 |
| 遥控器关闭 | ROS模式 | |
| 遥控器开启 | 遥控模式 |
ROS模式:车载电脑通过USB 串口与主控制盒相连接接收数据与控制机器人运动,下面章节专门介绍ROS相关开发。
使用roslaunch tianbot_teleop teleop_keyboard.launch命令进行键盘控制。
在ROS模式下使用如下按键对运动模式进行切换,
a:阿克曼模式s:旋转模式d:全向模式
使用i、j、k、l、,等按键对运动速度(i、j、k)和方向(l、,)进行控制。