使用指引
如何装机
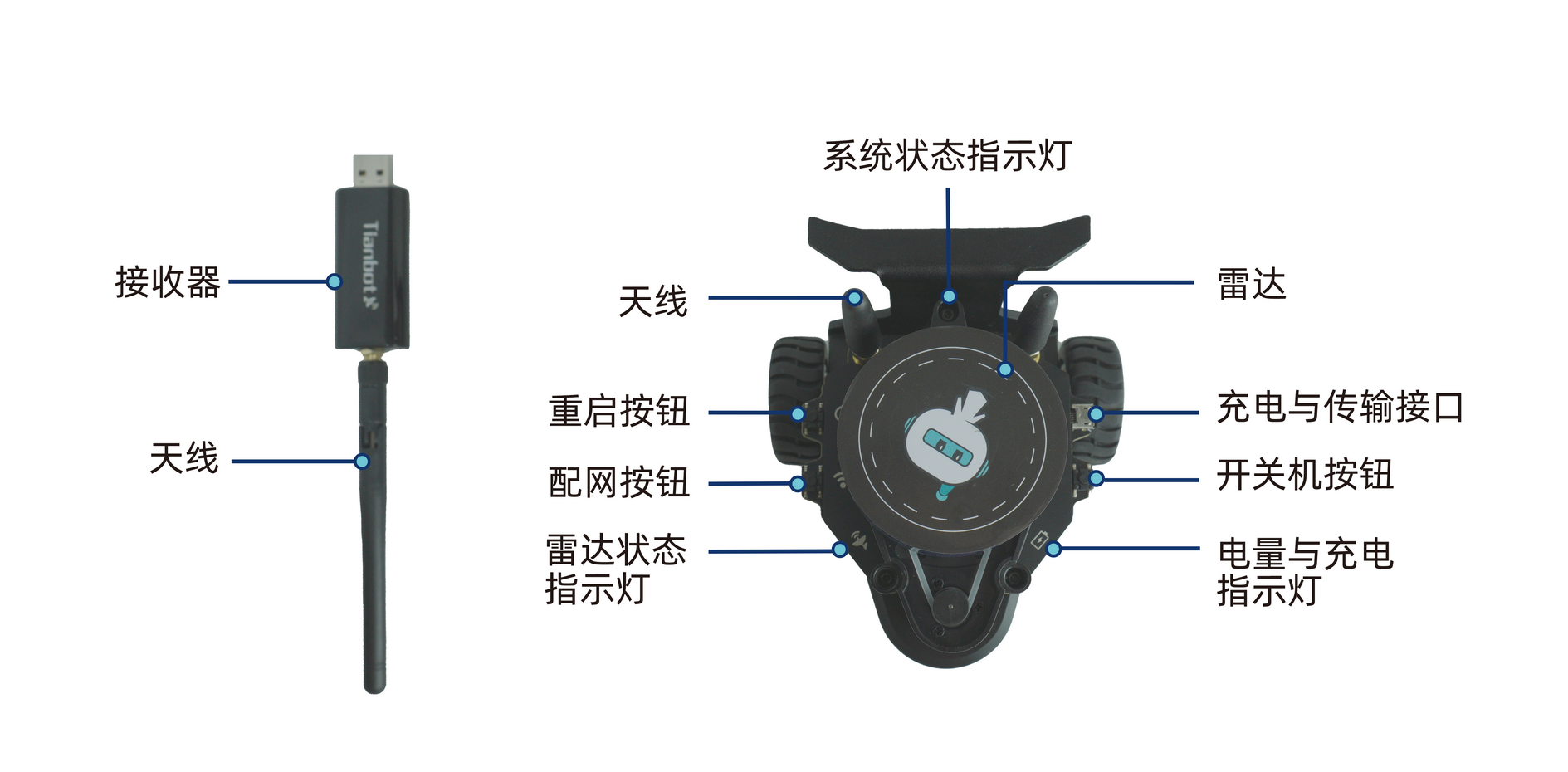
在检查收到产品无误后,需要将两根短天线安装在迷你机器人上,将一根长天线安装在接收器上,如下图所示:
- 充电接口:5V充电器(推荐使用5V2A充电器)
- 开关机:长按3秒,蜂鸣器响起,开机或者关机
- 重启:短按重启
- 配置网络:配置Tianbot Mini网络
指示灯说明
系统状态指示灯
- 黄灯闪烁:热点模式启动30S内需要连接到TBMINI-XXX热点
- 绿色常亮:已有客户端正常连接到TBMINI-XXX热点
- 白灯常亮:进入遥控控制模式,可以在网页端进行遥控控制
雷达状态指示灯
- 红灯常亮,蓝灯常亮,已正常配对连接。
- 红灯闪烁,此时雷达未连接成功,需检查线路以及接收器是否连接正常。
电量指示灯
- 在一格时指示灯闪烁,电量过低,处于该状态时,请立即充电,系统在此电量时,将无法保证正常工作。
如何开/关机
开关机:长按3秒,蜂鸣器响起,开机或者关机
如何充电
使用我们提供的Micro USB数据线进行,充电时,电量指示灯会常亮,
自检功能
首先,同时按下配网按钮和开关机按钮,等待蜂鸣器发出响声,听到响声后仅松开电源键按钮,继续按住配网键按钮,等待系统状态指示灯由红->蓝->紫,此时小车进入自检模式。
网页遥控
迷你机器人开机后使用电脑/手机等连接到TBMINI-XXXX热点后,可以打开浏览器访问tianbot_mini.local/joystick进行遥控控制,点击按键切换不同模式。
- 智能模式(ROS),默认是这个模式,系统状态指示灯为绿色,此模式我们可以控制小车移动建图,如果上位机未运行ROS节点,此模式下网页控制小车移动会卡顿;
- 遥控模式(WEB),系统状态指示灯变为白色,此模式相当于遥控小车,我们可以拖动摇杆控制机器人运动。
通用遥控页面:tianbot_mini.local/joystick