Tianbot mini使用手册
产品介绍
功能完善:TIANBOT迷你机器人配备360°激光雷达传感器,集成差速运动控制系统,只需3步即可实现SLAM建图导航功能,从开机到建图导航仅需数秒钟,快速帮您使用ROS机器人操作系统控制与构建智能机器人,同时可通过预置接口,连接扩展模块,轻松拓展更加丰富的应用场景。
适用场景:整体架构不仅继承传统ROS机器人的能力,适用于自主导航、无人驾驶、多机器人协作等技术的学习与教学。同时借助其自身小巧的体积,对场地的限制也大大降低,搭配组合式迷宫场地,可满足机器人教学过程中丰富的展示内容与实验需求。
二次开发:其附加的编程方式(python,cpp,javascript,arduino,matlab...)与创新的机器人架构,在满足对机器人多样化编程的同时,保持良好的使用体验,专注于算法的学习与验证。
产品参数
TIANBOT迷你机器人 | 参数 |
|---|---|
| 型号 | Tianbot Mini |
| 尺寸 | 130X120X110mm |
| 重量 | 500g |
| 速度 | 0.5m/s max |
| 续航 | 0-40°C |
| 充电 | 5V 2A |
核心功能
- 人机遥控(Android、iOS、Windows、Linux)
拓展功能
- ASR语音识别 (TBM语音拓展)
- Arduino编程 (TBM编程拓展)
- 小爱同学控制 (TBM第三方拓展)
机器人操作系统加持后的功能
- 地图绘制(SLAM)
- 无人驾驶(自主导航)
- 手势识别(深度学习)
- 人脸识别(机器视觉)
- 多级协作(群体智能)
10秒快速SLAM
ROS2GO启动电脑,接收器连接电脑 启动迷你机器人,电脑连接TBMINI-XXXX热点 打开终端运行
shell
roslaunch tianbot_mini demo_slam.launch产品架构
TIANBOT迷你机器人产品区别于传统ROS小车,创造性的去掉了传统ROS小车底盘中的运算平台,将整个底盘里程数据、雷达数据等通过无线透传的形式传输到上位机中,在使用过程中开发者直接深入ROS框架、算法进行学习,规避底层细节更加专注上层软件开发来控制机器人完成不同的任务。
硬件架构
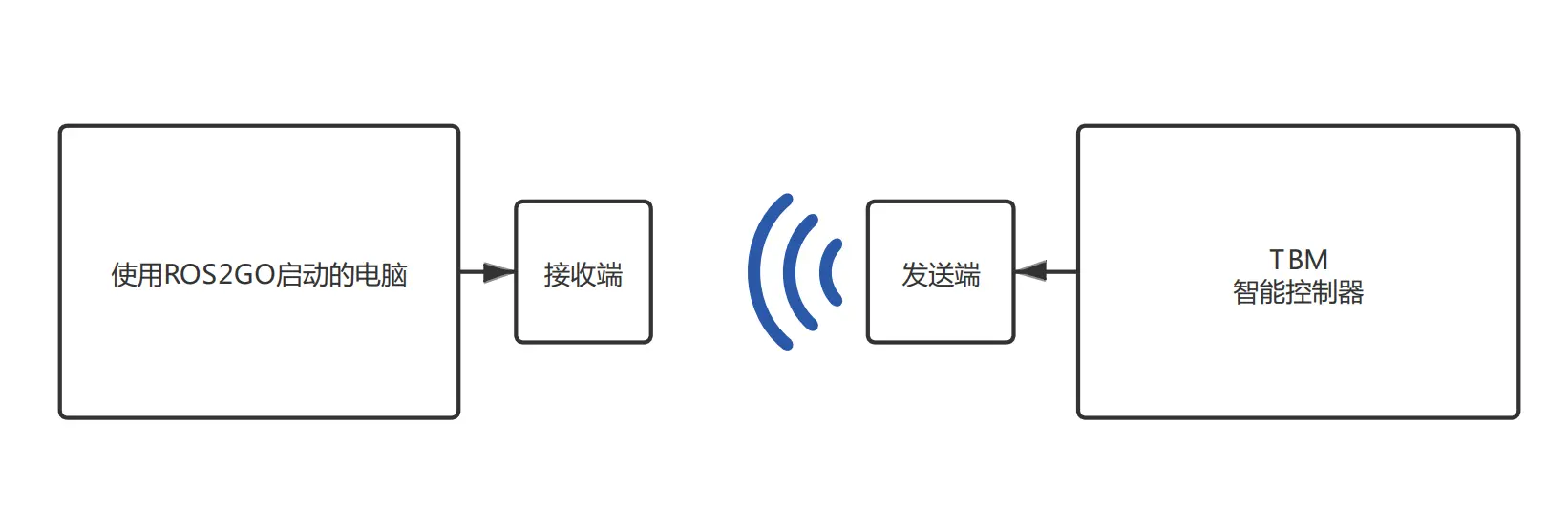
底层TBM智能控制器,主要完成实时各种任务:
- 编码器信息处理转发
- 激光雷达信息处理转发
- 其他通信数据处理转发
将接收器连接到使用ROS2GO启动的电脑上,可以接收底层TBM控制器发送的信息,完成复杂任务如:
- 实时建图、定位
- 局部、全局运动规划
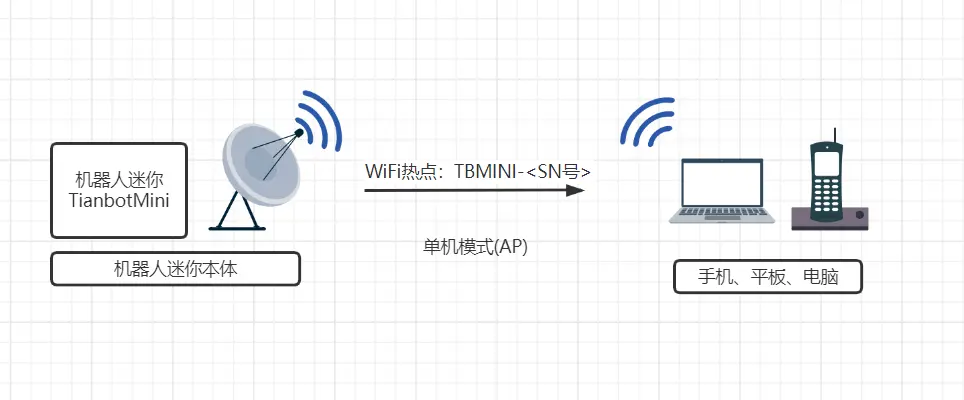
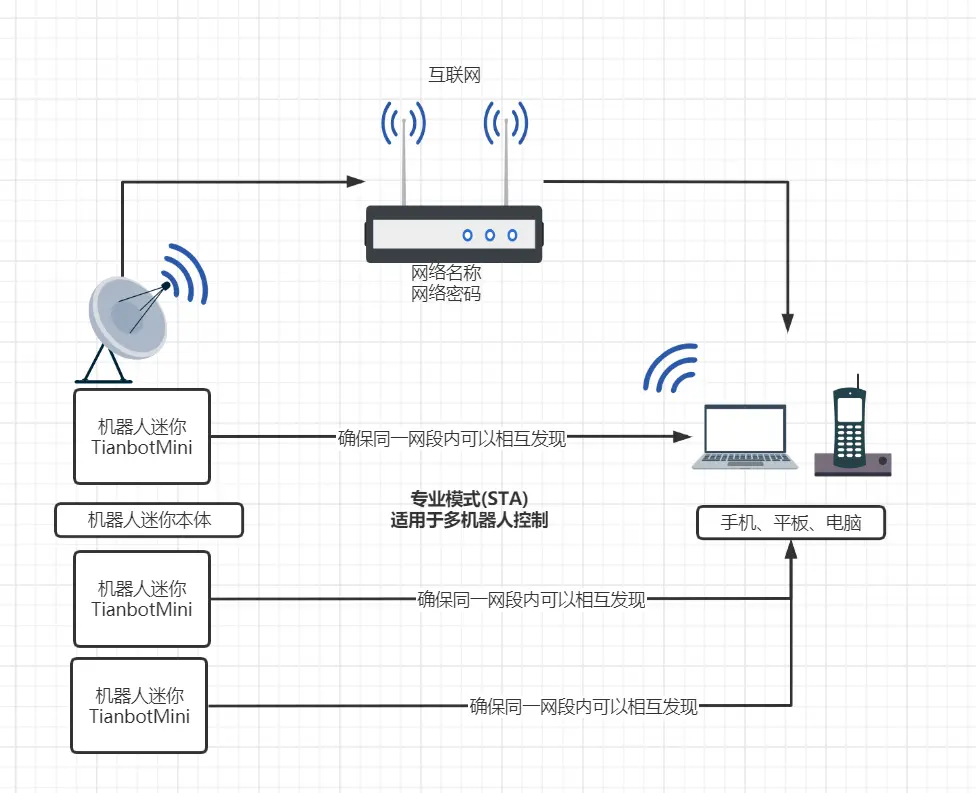
通信架构
- 单机模式(默认启动)
- 多机模式
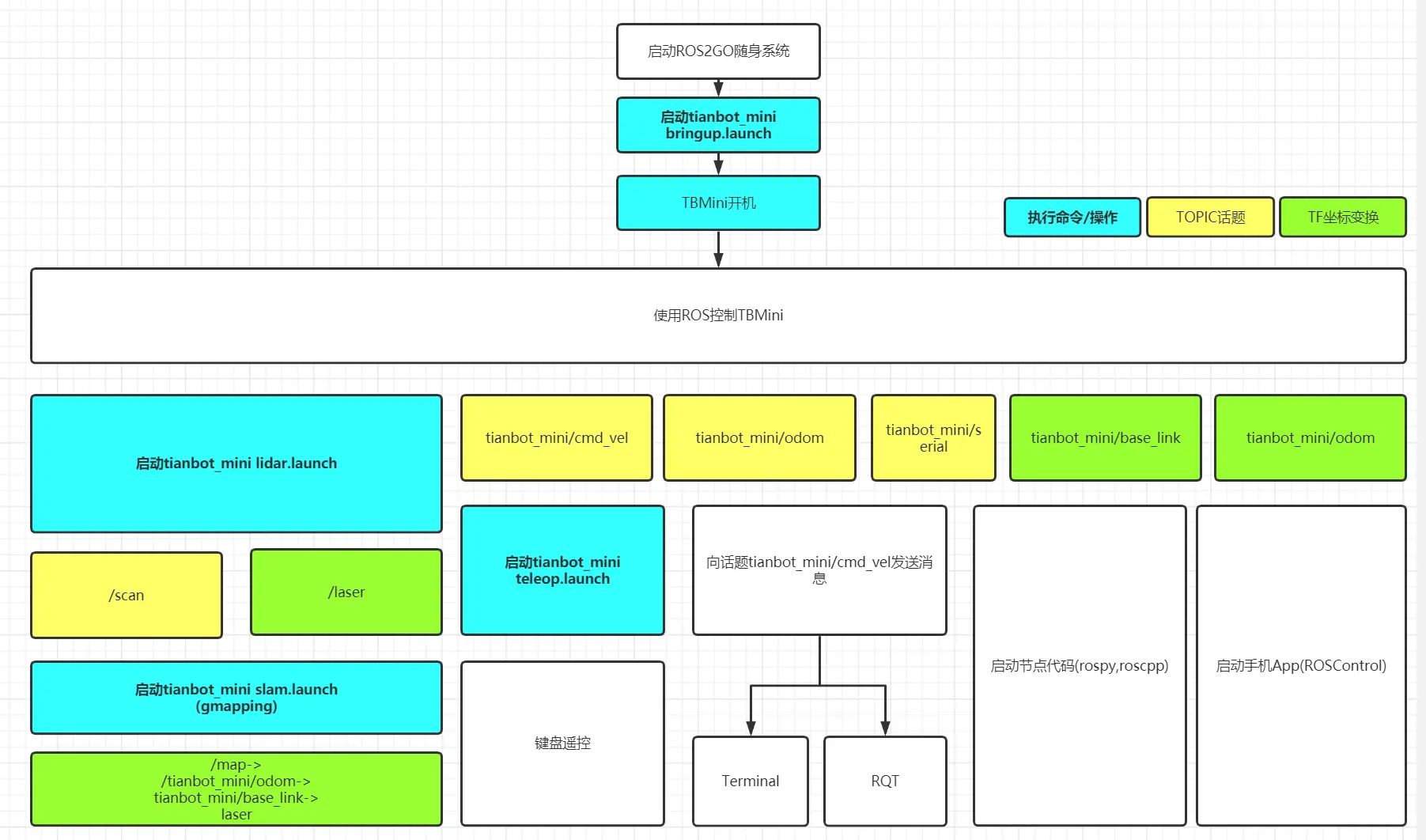
软件架构
保修政策
自收到货物起算,保修期内正常使用,无擅自拆修、改装,出现非人为的性能故障,提供有效的购买证明、单据
类型 | 时效 |
|---|---|
| Tianbot Mini | 180天 |
| 接收器 | 180天 |
| ROS2GO本体 | 365天 |
您也可以通过以下链接了解迷你机器人