ROSECHO 使用手册
开箱测试
开机上电
ROSECHO共有两个外部接口,12V的电源接口和MicroUSB的数据接口。使用前,需要用自带的12V充电器给ROSECHO通电,然后会听到音箱的启动音。启动完毕后可以说“波弟波弟”唤醒。但此时没有联网,所以问任何问题,ROSECHO都只会回答“网络未连接,请连接网络”。
Windows下配置网络
ROSECHO有多种配置网络的方式。如果在Ubuntu下配网,可以略过此节,查看下面的使用指南。 在Windows环境下,可以使用我们提供的AIUI串口调试助手进行网络配置。
用MicroUSB数据线将ROSECHO接入电脑,打开AIUI串口调试助手(无需安装)。如果您在串口下拉菜单中有多个设备,就需要在设备管理器中查看CP210X设备的端口号

如图所示,这里选择串口为COM4,波特率为115200,点击打开。

成功连接后,打开该按钮会变灰。然后点击WIFI配置,输入需要接入的网络SSID和密码。
注意
AIUI仅支持WIFI 2.4G,不能接入WIFI 5G的网络!
然后点击WIFI状态查询,此时在右边的控制台可以看到

这说明网络已经连接成功。
语音对话测试
ROSECHO的默认唤醒词为 “波弟波弟”
ROSECHO上有状态指示灯。未唤醒时指示灯灭。设备唤醒后,状态指示灯为蓝色,ROSECHO可以接收语音命令。绿灯亮时说明云端没有返回。
现在,ROSECHO就可以完成一个普通智能音箱的对话、查询天气、唱歌、垃圾分类等语音交互。查看云端问答可以了解更多ROSECHO能够自主回答的问题。
使用指南
驱动安装
如果使用ROS2GO系统,可以略过此安装步骤
没有ROS2GO的用户需要自己安装设备驱动。
- 源码安装,我们需要将功能包放在
catkin_ws的工作空间,执行以下步骤
cd ~/catkin_ws/src/
git clone https://github.com/tianbot/rosecho.git
cd ~/catkin_ws && catkin_make启动ROSECHO
用自带的MicroUSB线将ROSECHO与电脑连接。可以在终端中输入lsusb命令查看是否增加了一个cp210x的USB转串口设备以确定连接无误。 
启动ROSECHO的驱动节点
roslaunch rosecho rosecho.launch默认使用/dev/ttyUSB0的设备。
如果打开串口失败,请确认设备的可以使用serial_port参数传递或者更改launch文件修改到对应串口设备。假设设备端口为/dev/ttyUSB1,可以使用如下命令启动
roslaunch rosecho rosecho.launch serial_port:=/dev/ttyUSB1启动成功后,屏幕会有如下显示 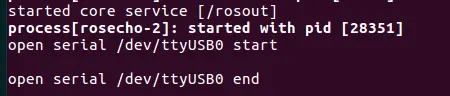
配置网络
需要调用服务让ROSECHO执行网络配置
rosservice call /rosecho/wifi_cfg "ssid: 'tianbot' password: 'www.tianbot.com'"注意
可以先用Tab键补齐命令,然后填充ssid和password
听:查看语音识别结果
语音交互功能首先需要进行语音识别。
语音识别的结果是通过/rosecho/asr输出的,但是因为python对于utf-8编码的中文支持不好,通过rostopic echo查看结果不能显示中文字符(并不影响程序开发)。下图的内容实际是中文字符“你好” 
所以需要执行打印语音识别结果在屏幕的程序
rosrun rosecho asr_echo.py运行结果如下 
答:查看回答返回结果
ROSECHO接收语音指令或问题后,会在云端识别并匹配问答库,如果有答案则会返回并播放。需要查看返回的答案,可以运行
rosrun rosecho answer_echo.py
云端问答库是由官方维护的。查看云端问答可以了解更多ROSECHO能够自主回答的问题。
说:运行TTS文本转语音
云端问答库很丰富,帮助大家解决的绝大多数常见问题的语音问答。但是如果希望针对特定问题进行自主问答的开发,就需要ROSECHO的文本转语音的功能,即TTS(Text to Speech)。ROSECHO的默认TTS是在线处理的,如果需要离线版本,可以联系客服,或者查看AIUI配置以了解如何改变为离线TTS。TTS功能在ROS中使用actionlib的方式执行,因为语句较长不能够马上执行完毕,需要检测其状态。 测试时,仅需要向 /rosecho/tts/goal rosecho/ttsActionGoal话题发送消息。ActionGoal的话题消息类型比较复杂,需要用Tab补齐命令,最后填入text的内容即可。
使用如下命令调用TTS功能
rostopic pub /rosecho/tts/goal rosecho/ttsActionGoal "header:
seq: 0
stamp:
secs: 0
nsecs: 0
frame_id: ''
goal_id:
stamp:
secs: 0
nsecs: 0
id: ''
goal:
text: '你好机器人'"演示
所有的基本功能测试成功后,可以实现一个简单的语音命令控制自主导航演示。在turtlebot_stage下可以使用语音指令控制仿真的Turtlebot去到不同的地点。
这个Demo融合了语音识别、自主问答(非云端)、TTS,并且与移动机器人自主导航进行结合。
roslaunch rosecho rosecho.launch
roslaunch turtlebot_stage turtlebot_in_stage.launch
rosrun rosecho demo.py程序运行完之后,可以使用“波弟波弟”唤醒ROSECHO,然后说出语音指令“去端茶”,ROSECHO会语音回复,然后命令Turtlebot去到指定地点。“回家”,也会有语音回复,然后回到初始位置。
在运行过程中说出唤醒词“波弟波弟”,机器人会停下并转向声源方向(声源定位功能)。大家可以基于这个简单的Demo开发自己的应用案例。
深入开发
深入开发ROSECHO,仅提供参考资料
ROS机器人操作系统
入门免费视频可以观看古月居的B站视频
快速进阶可以选择ROS2GO
状态机
ROS下的状态机开发smach更加方便
游戏级的基于C++的状态机开发