用 isaacgym 复现 LocomotionWithNP3O-master-tinymal4
项目简介
介绍
此版本是华北舵狗王对 LocomotionWithNP3O 进行修改后的版本,向项目原作者致谢!
该项目提供了从训练到实物 C++ 部署的完整四足机器人例子,可以实现上下楼梯,越障,训练算法采用了带约束的 PPO,可以在设置奖励的基础上进一步通过约束 cost 代价函数的方式实现对智能体的训练。
- 项目地址:https://github.com/zeonsunlightyu/LocomotionWithNP3O
- RL 学习系列 3:狗王 5 天带你上手 IsaccGym 借鉴开源
- 项目效果:感觉比之前好多了呢(rl 运控实验成功系列)
项目原作者视频里展示的方案是类似 himloco 的单阶段训练方案,一样用到了对比学习。
- 与 himloco 的 swav 算法 不同,项目原作者用了 barlow twin 算法,后者没有 prototype 的概念
- 同时项目原作者的对比学习目标不是拉近 history 和未来 t+1 的 latent 的相似度,而是拉近 t:t-5 与 t+1:t-4 之间的差异(公用 mlp encoder 与对比学习论文的结构设计更是吻合)
- 项目原作者的方案 2000 轮能收敛到 terrain level 6,效果还不错
- 项目原作者是业余爱好,所以没有发表论文,小伙伴们可以去项目原作者的 Github issue 进行交流。
注意
下文中的操作在 ROS2GO 512G ISAAC 特别定制版本中有效,不再另行通知。使用 Isaac gym 的方式是基于/home/tianbot/.isaacgym 这一 Python3.8 环境安装的,所以 请勿随意删除 ~/.isaacgym及~/isaacgym_ws 的任意出厂内置文件,否则可能会造成原本内置好的 isaacgym 训练环境崩溃!!!!!!
提示
如果希望在终端中直接使用 Isaac Gym,首先需要执行以下命令,无需自己重新再配置环境:
source ~/.isaac_env_toolkit && isaac_gym_env切换到.isaacgym 虚拟环境
如果希望在终端中直接使用 Isaac Gym,首先需要执行以下命令,无需自己重新再配置环境,无需 pip install 安装此项目:
source ~/.isaac_env_toolkit && isaac_gym_env提示
使用如下命令检查 pip 和 python 的安装路径,确认使用的是虚拟环境中的 pip 和 python
which pip
which python
whereis pip
whereis python
pip --version注意
如需安装新的依赖项,请自行确定是否会破坏已经内置的环境,如果由于操作不当,造成环境依赖出现问题,请及时在相关售后群里提问,或参考 timeshift 恢复操作进行恢复
pip --version
pip list # 查看当前 pip 下已安装的模块训练策略
注意
运行下述操作时,无需自己重新再配置环境,无需 pip install -e 安装此项目:
cd ~/isaacgym_ws/src/LocomotionWithNP3O_fixed
python3 train.py --task=go2N3poHim --num_env=1024 --headless # set env num提示
可用的任务有:
- go2N3poHim
- Tinymal
- go2N3poTransP1
- go2N3poTransP2
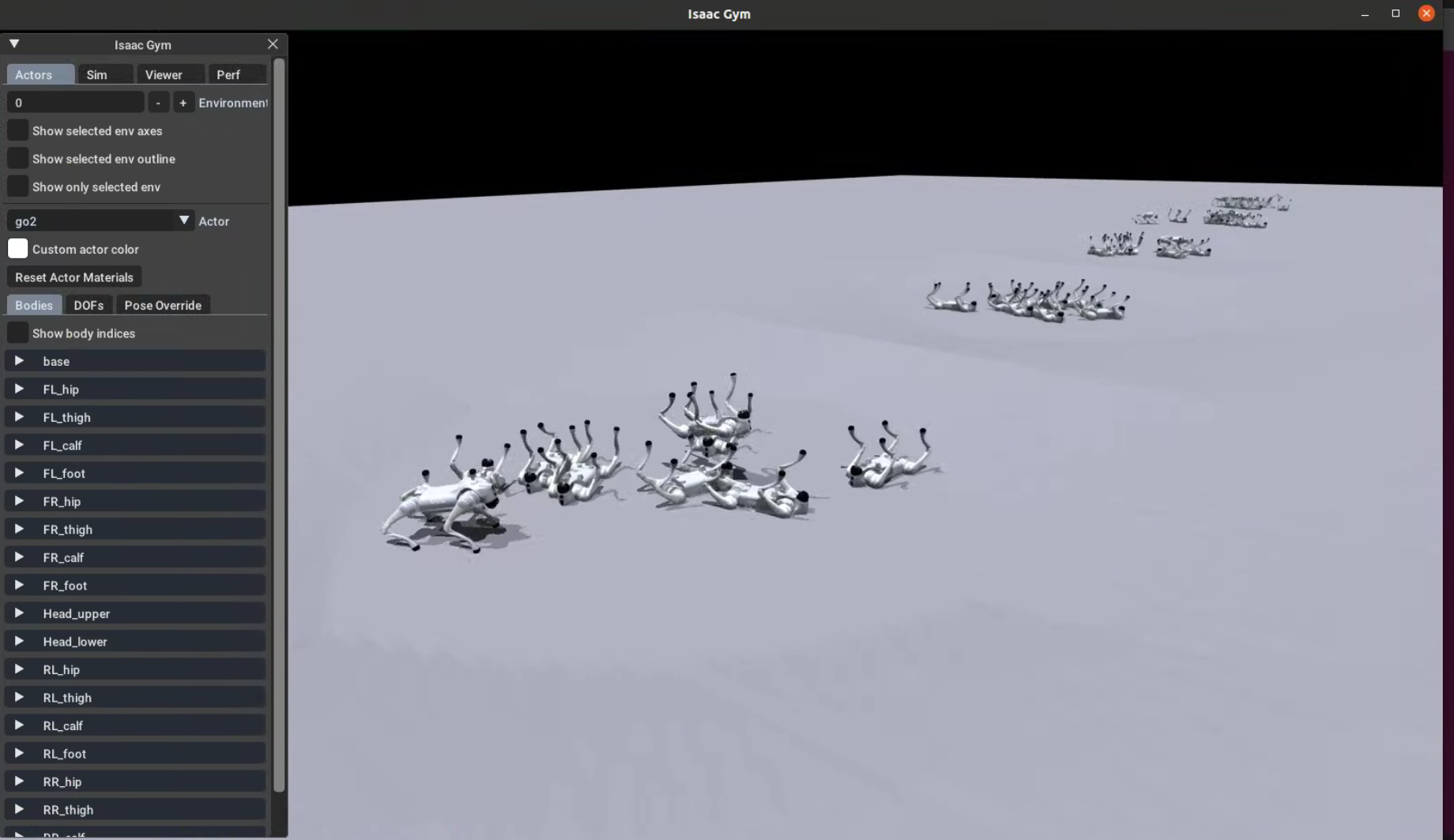
策略演示
cd ~/isaacgym_ws/src/LocomotionWithNP3O_fixed
python3 simple_play.py --task=go2N3poHim
Sim2sim
cd ~/isaacgym_ws/src/LocomotionWithNP3O_fixed
python3 sim2sim.py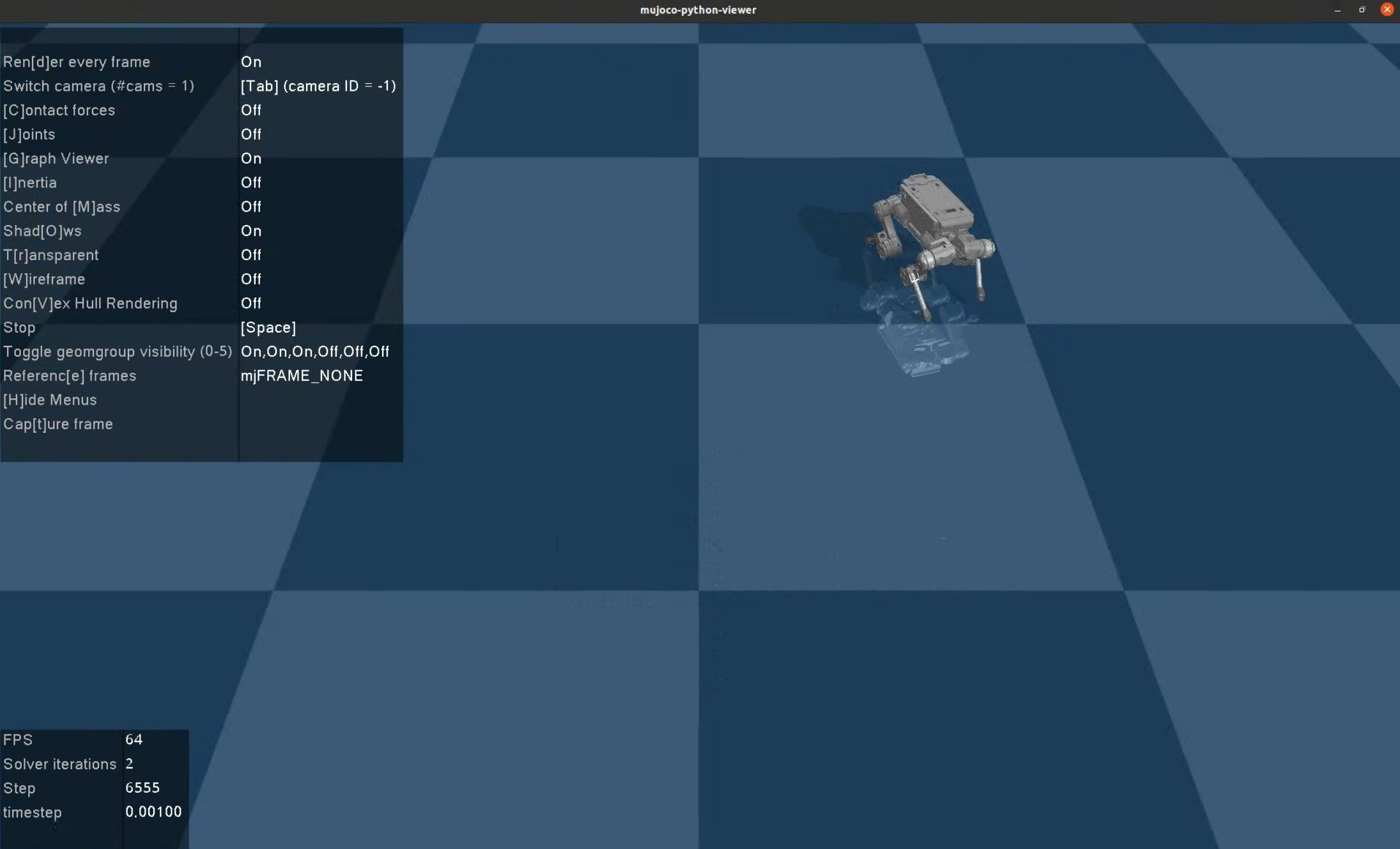
C++ 部署
cd ~/isaacgym_ws/src/LocomotionWithNP3O_fixed/deploy/ # 进入ros1 deploy部署目录
catkin_make如遇到报错Could not find a package configuration file provided by "Torch" with any of the following names,可参考以下链接解决: