用 isaacsim 复现 robot_lab
项目简介
robot_lab 是一个面向机器人的 RL 扩展库,基于 IsaacLab 存储库开发,并与之解耦。 向项目原作者致谢!
注意
下文中的操作在 ROS2GO 512G ISAAC 特别定制版本中有效,不再另行通知。使用 Isaac Sim 的方式是基于/home/tianbot/isaacsim_ws/isaac-sim-standalone@4.5.0/kit/python 这一 Python3.10 环境安装的,所以 请勿随意删除 isaacsim_ws 中的任意出厂内置文件,否则可能会造成原本内置好的 Isaac Sim 4.5.0 + Isaaclab 2.0.0 环境崩溃!!!!!!
提示
如果希望在终端中直接使用 Isaac Sim,首先需要执行以下命令,无需自己重新再配置环境:
source ~/.isaac_env_toolkit && isaac_sim_env切换到 IsaacSim 4.5.0 + Isaaclab 2.0.0
如果希望在终端中直接使用 Isaac Sim,首先需要执行以下命令,无需自己重新再配置环境,无需 pip install 安装此项目:
source ~/.isaac_env_toolkit && isaac_sim_env提示
使用如下命令检查 pip 和 python 的安装路径,确认使用的是虚拟环境中的 pip 和 python
which pip3
which python3
whereis pip3
whereis python3
pip3 --version注意
如需安装新的依赖项,请自行确定是否会破坏已经内置的环境,如果由于操作不当,造成环境依赖出现问题,请及时在相关售后群里提问,或参考 timeshift 恢复操作进行恢复
pip3 --version
pip3 list # 查看当前 pip 下已安装的模块训练策略
注意
运行下述操作时,无需自己重新再配置环境,无需 pip install -e 安装此项目:
基于 isaacsim 4.5.0 + isaaclab 2.0.0 进行训练
以下命令需要在 ~/isaacsim_ws/src/robot_lab 目录下执行
cd ~/isaacsim_ws/src/robot_lab
source ~/.isaac_env_toolkit && isaac_sim_env四足机器人
Unitree A1
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/train.py --task RobotLab-Isaac-Velocity-Rough-Unitree-A1-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Rough-Unitree-A1-v0Unitree Go2
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/train.py --task RobotLab-Isaac-Velocity-Rough-Unitree-Go2-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Rough-Unitree-Go2-v0Unitree B2
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/train.py --task RobotLab-Isaac-Velocity-Rough-Unitree-B2-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Rough-Unitree-B2-v0Anymal D
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/train.py --task RobotLab-Isaac-Velocity-Rough-Anymal-D-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Rough-Anymal-D-v0轮式机器人
Unitree Go2W
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/train.py --task RobotLab-Isaac-Velocity-Rough-Unitree-Go2W-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Rough-Unitree-Go2W-v0Unitree B2W
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/train.py --task RobotLab-Isaac-Velocity-Rough-Unitree-B2W-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Rough-Unitree-B2W-v0
人形机器人
FFTAI GR1T1
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/train.py --task RobotLab-Isaac-Velocity-Rough-FFTAI-GR1T1-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Rough-FFTAI-GR1T1-v0
FFTAI GR1T2
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/train.py --task RobotLab-Isaac-Velocity-Rough-FFTAI-GR1T2-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Rough-FFTAI-GR1T2-v0Unitree H1
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/train.py --task RobotLab-Isaac-Velocity-Rough-Unitree-H1-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Rough-Unitree-H1-v0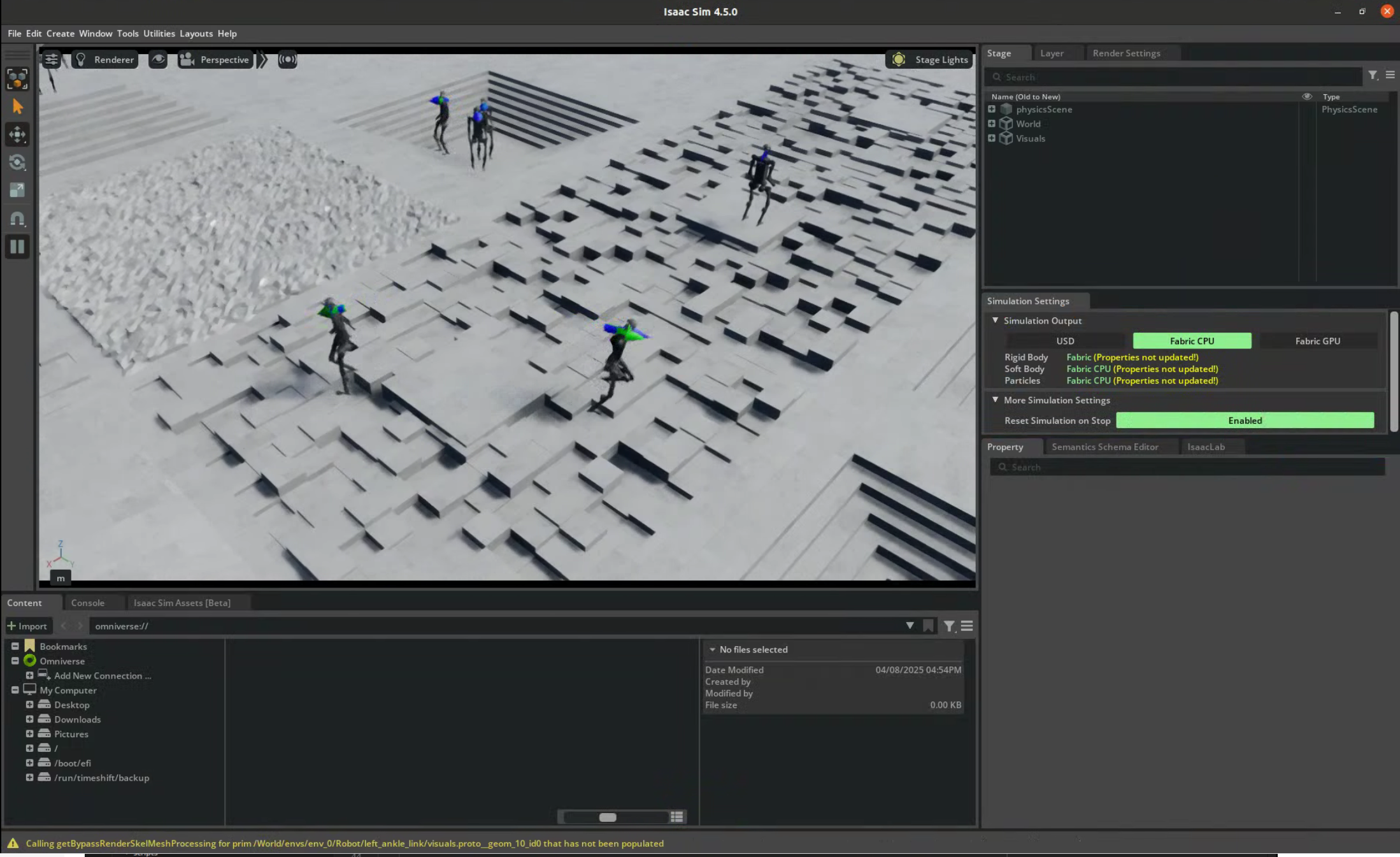
Unitree G1
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/train.py --task RobotLab-Isaac-Velocity-Rough-Unitree-G1-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Rough-Unitree-G1-v0使用 AMP 训练四足机器人
The code for AMP training refers to AMP_for_hardware
Unitree A1
# Retarget motion files
cd ~/isaacsim_ws/src/robot_lab
python3 source/robot_lab/robot_lab/third_party/amp_utils/scripts/retarget_kp_motions.py# Replay AMP data
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/amp/replay_amp_data.py --task RobotLab-Isaac-Velocity-Flat-Amp-Unitree-A1-v0
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/amp/train.py --task RobotLab-Isaac-Velocity-Flat-Amp-Unitree-A1-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/amp/play.py --task RobotLab-Isaac-Velocity-Flat-Amp-Unitree-A1-v0
HandStand
支持倒立四个方向,使用配置文件中的 handstand type 进行切换
Unitree A1
# Train
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/train.py --task RobotLab-Isaac-Velocity-Flat-HandStand-Unitree-A1-v0 --headless
# Play
cd ~/isaacsim_ws/src/robot_lab
python3 scripts/rsl_rl/base/play.py --task RobotLab-Isaac-Velocity-Flat-HandStand-Unitree-A1-v0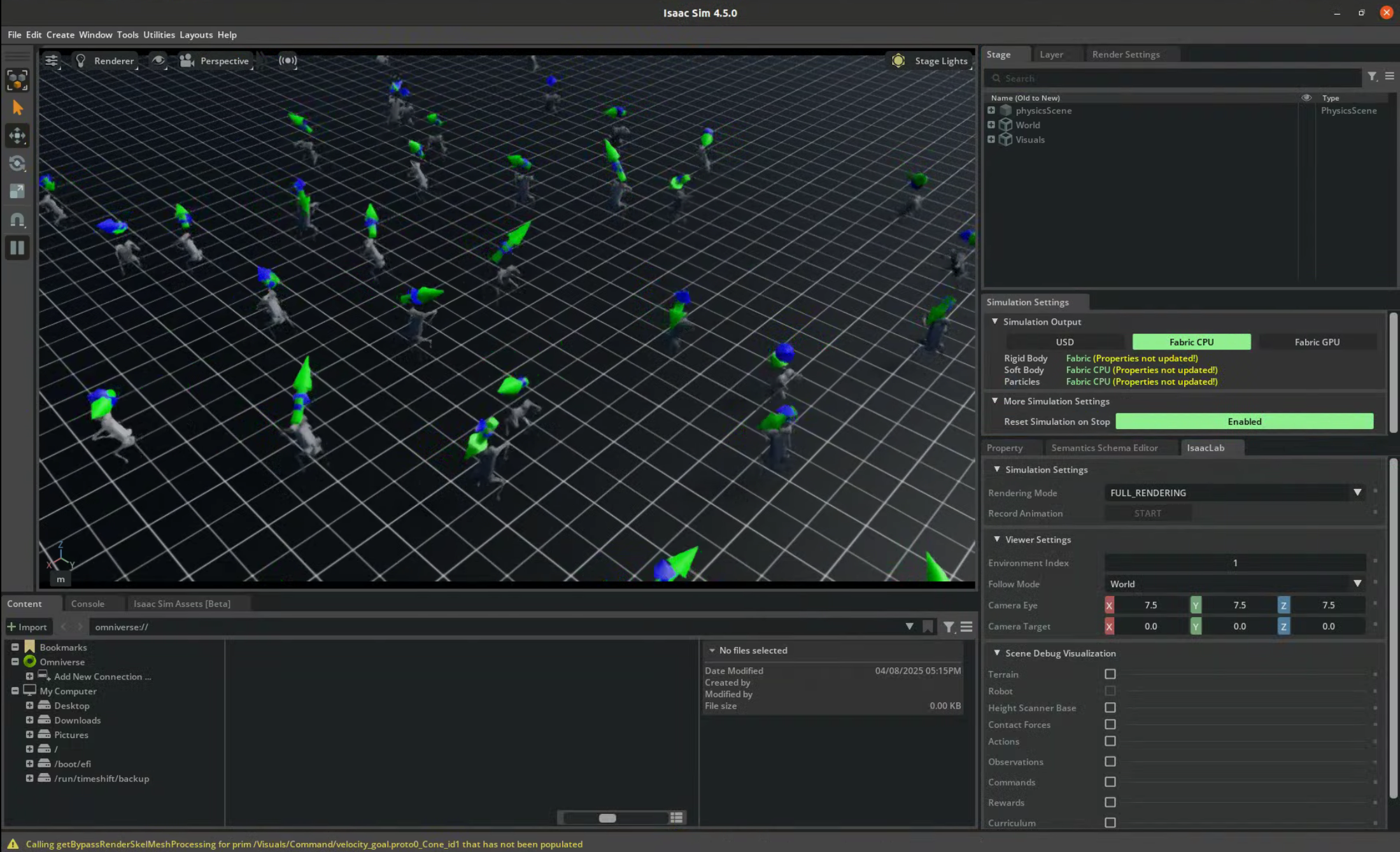
注意
- 您可以在上述配置中将 'Rough' 更改为
Flat - 录制训练有素的代理的视频(需要安装
ffmpeg),添加视频视频长度 200 - 演示 32 个环境的 Train 游戏,添加
--num_envs 32 - 在特定文件夹或检查点上播放,添加
--load_run run_folder_name --checkpoint model.pt - 从文件夹或检查点恢复训练,添加
--resume --load_run run_folder_name --checkpoint model.pt