Isaac Sim 4.5.0 + Isaac Lab 2.0.0
目前最新版本的 ROS2GO 的关键信息
- 系统版本为 Ubuntu 20.04 LTS
- 内核版本为 6.11.6-ros2go
- Nvidia Driver 版本为 555.42.06
- 系统默认的 python 版本为 3.8.10
Isaac Sim 4.5.0 安装
运行兼容性检查
可以使用Isaac Sim Compatibility Checker工具检查是否满足 Isaac Sim 的硬件配置要求
# 下载 isaac sim 4.5.0 的兼容性检查工具
curl -LJO https://download.isaacsim.omniverse.nvidia.com/isaac-sim-comp-check%404.5.0-rc.6%2Brelease.675.f1cca148.gl.linux-x86_64.release.zip
# 解压 isaac sim 4.5.0 的兼容性检查工具
unzip -d ~/isaacsim_ws/isaac-sim-comp-check@4.5.0 isaac-sim-comp-check%404.5.0-rc.6%2Brelease.675.f1cca148.gl.linux-x86_64.release.zip
# 运行 isaac sim 4.5.0 的兼容性检查工具
cd ~/isaacsim_ws/isaac-sim-comp-check@4.5.0 && ./omni.isaac.sim.compatibility_check.sh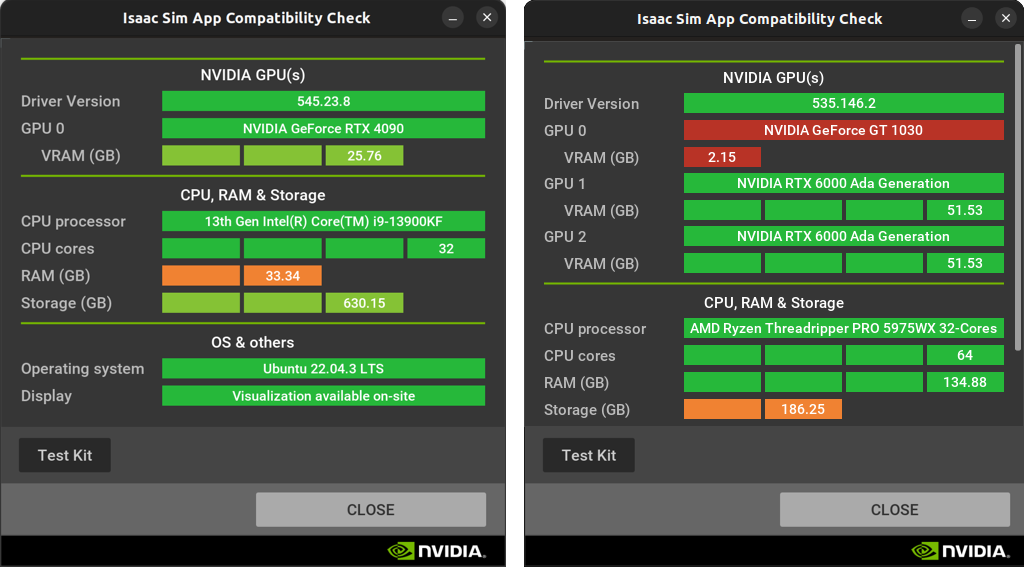
相关文档
安装下载
提示
通过网盘分享的文件:Isaacsim4.5.0、IsaacLab 2.0.0 及相应资产文件 链接: https://pan.baidu.com/s/17GFbrs5O1yG9R67C8FwnlA?pwd=2016 提取码: 2016 --来自百度网盘超级会员v2的分享
- 从 isaac sim 官网下载
isaac sim 4.5.0和asset资产文件 https://docs.isaacsim.omniverse.nvidia.com/latest/installation/download.html
下载 isaac sim Asset
下载完成后按照如下路径解压,合并 3 个资产文件,便于后续使用

最后完成的 Asset 路径和目录结构如下
(.ros2) tianbot@ros2go:~/Downloads/Assets/IsaacSim/Assets/Isaac/4.5$ ls
Isaac NVIDIA下载 zip 安装包
cd ~/isaacsim_ws/
curl -LJO https://download.isaacsim.omniverse.nvidia.com/isaac-sim-standalone%404.5.0-rc.36%2Brelease.19112.f59b3005.gl.linux-x86_64.release.zip
unzip -d isaac-sim-standalone@4.5.0 isaac-sim-standalone%404.5.0-rc.36%2Brelease.19112.f59b3005.gl.linux-x86_64.release.zip下载 isaac lab
cd ~/isaacsim_ws/
curl -LJO https://github.com/isaac-sim/IsaacLab/archive/refs/tags/v2.0.0.zip
unzip -d IsaacLab-2.0.0 v2.0.0.zip安装 ISAAC SIM
配置环境变量
# add ros2 humble path
source $(ros2go_switch -v 2)
# add python3.10 path when Isaac Lab is need
export PATH=~/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/kit/python/bin:$PATH
# vk_icd_filenames
export VK_ICD_FILENAMES=/usr/share/vulkan/icd.d/nvidia_icd.json
# Isaac Sim root directory
export ISAACSIM_PATH="${HOME}/isaacsim_ws/isaac-sim-standalone@4.5.0"
# Isaac Sim python executable
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/python.sh"创建 isaac sim 在 isaac lab 中的链接
cd isaacsim_ws/IsaacLab-2.0.0/ && ln -s ~/isaacsim_ws/isaac-sim-standalone@4.5.0 _isaac_sim此时开启 Isaac Sim
${ISAACSIM_PATH}/isaac-sim.selector.sh提示
可以通过添加--help来查看所有参数可用
${ISAACSIM_PATH}/isaac-sim.selector.sh --help选择完成之后,点击 START,Isaac Sim 选择器窗口会自动关闭,此时即可等待 Isaac Sim 启动成功。

安装 Isaac Lab
切换 pip 源
mkdir ~/.pip && touch ~/.pip/pip.conf
gedit ~/.pip/pip.conf填入如下内容后保存,然后关闭文件。
pip.conf
[global]
index-url = https://pypi.tuna.tsinghua.edu.cn/simple
[install]
trusted-host = https://pypi.tuna.tsinghua.edu.cn确定 python3 版本和路径
由于ROS2GO中的ros2go默认使用的是python3.8,所以为了既不影响ROS2GO依赖python3.8 的应用运行,又可以正常安装Isaac Lab,满足其3.10版本的需求。 我们需要确保在使用时将 python3 映射为 isaac_sim 4.5.0 中的自带的 python3.10,这里需要先确定python3的版本和路径,然后才能进行下一步的安装。
这里采用一种比较简单的方式,修改 系统环境变量PATH,将 python3 映射为 isaac_sim 4.5.0 中的自带的 python3.10,在进行下一步的安装。
export PATH=~/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/kit/python/bin:$PATHwhich python3
whereis pip
whereis python3
python3 -m pip --version注意
要确保 python3 版本为 3.10.0,其路径为/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/kit/python/bin/python3
(.ros2) tianbot@ros2go:~$ which python3
/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/kit/python/bin/python3否则会出现一些错误could not import ....的问题,因为python3版本不对,导致安装的模块的路径不对,导致无法正常运行。
1.安装 pytorch
python3.10 -m pip install torch==2.5.1 # for cuda 122.安装 rsl-rl-lib
python3.10 -m pip install rsl-rl-lib@git+https://github.com/leggedrobotics/rsl_rl.git3.Isaac Lab
cd isaacsim_ws/IsaacLab-2.0.0/ && ./isaaclab.sh --install # or "./isaaclab.sh -i"创建 nvidia_icd.json
sudo gedit /usr/share/vulkan/icd.d/nvidia_icd.json/usr/share/vulkan/icd.d/nvidia_icd.json
{
"file_format_version" : "1.0.0",
"ICD": {
"library_path": "libGLX_nvidia.so.0",
"api_version" : "1.3.278"
}
}修改~/.bashrc
sudo gedit ~/.bashrc将如下内容添加到文件中,然后关闭文件。
export PATH=~/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/kit/python/bin/:$PATH
export VK_ICD_FILENAMES=/usr/share/vulkan/icd.d/nvidia_icd.json
# Isaac Sim root directory
export ISAACSIM_PATH="${HOME}/isaacsim_ws/isaac-sim-standalone@4.5.0"
# Isaac Sim python executable
export ISAACSIM_PYTHON_EXE="${ISAACSIM_PATH}/python.sh"实例测试
cd isaacsim_ws/IsaacLab-2.0.0/ && python3 scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Ant-v0
Traceback (most recent call last):
File "/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/scripts/reinforcement_learning/rsl_rl/train.py", line 13, in <module>
from isaaclab.app import AppLauncher
File "/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/source/isaaclab/isaaclab/app/__init__.py", line 15, in <module>
from .app_launcher import AppLauncher # noqa: F401, F403
File "/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/source/isaaclab/isaaclab/app/app_launcher.py", line 27, in <module>
from isaacsim import SimulationApp
ModuleNotFoundError: No module named 'isaacsim'大体猜一下,估计是PYTHONPATH没有设置正确isaacsim的路径导致的。
(.ros2) tianbot@ros2go:~/isaacsim_ws/IsaacLab-2.0.0$ python3 scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Ant-v0
Traceback (most recent call last):
File "/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/scripts/reinforcement_learning/rsl_rl/train.py", line 13, in <module>
from isaaclab.app import AppLauncher
File "/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/source/isaaclab/isaaclab/app/__init__.py", line 15, in <module>
from .app_launcher import AppLauncher # noqa: F401, F403
File "/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/source/isaaclab/isaaclab/app/app_launcher.py", line 27, in <module>
from isaacsim import SimulationApp
ModuleNotFoundError: No module named 'isaacsim'
(.ros2) tianbot@ros2go:~/isaacsim_ws/IsaacLab-2.0.0$ echo $PYTHONPATH
/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/kit/python/lib/python3.10/site-packages/:/home/tianbot/.ros2/lib/python/site-packages:/home/tianbot/ros2_study_ws/install/learning_urdf/lib/python3.8/site-packages:/home/tianbot/ros2_study_ws/install/learning_topic/lib/python3.8/site-packages:/home/tianbot/ros2_study_ws/install/learning_tf/lib/python3.8/site-packages:/home/tianbot/ros2_study_ws/install/learning_service/lib/python3.8/site-packages:/home/tianbot/ros2_study_ws/install/learning_qos/lib/python3.8/site-packages:/home/tianbot/ros2_study_ws/install/learning_pkg_python/lib/python3.8/site-packages:/home/tianbot/ros2_study_ws/install/learning_parameter/lib/python3.8/site-packages:/home/tianbot/ros2_study_ws/install/learning_node/lib/python3.8/site-packages:/home/tianbot/ros2_study_ws/install/learning_launch/lib/python3.8/site-packages:/home/tianbot/ros2_study_ws/install/learning_action/lib/python3.8/site-packages:/home/tianbot/ros2_study_ws/install/learning_interface/lib/python3.8/site-packages:/home/tianbot/ros2_study_ws/install/learning_gazebo/lib/python3.8/site-packages:/opt/ros/humble/lib/python3.9/site-packages:/opt/ros/humble/lib/python3.8/site-packages解决方法:
(.ros2) tianbot@ros2go:~/isaacsim_ws/IsaacLab-2.0.0$ source ~/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/setup_conda_env.sh
(.ros2) tianbot@ros2go:~/isaacsim_ws/IsaacLab-2.0.0$ echo $PYTHONPATH
/home/tianbot/.ros2/lib/python/site-packages:/opt/ros/humble/lib/python3.9/site-packages:/opt/ros/humble/lib/python3.8/site-packages:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/python_packages:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/exts/isaacsim.simulation_app:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/extsDeprecated/omni.isaac.kit:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/kit/kernel/py:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/kit/plugins/bindings-python:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/exts/isaacsim.robot_motion.lula/pip_prebundle:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/exts/isaacsim.asset.exporter.urdf/pip_prebundle:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/extscache/omni.kit.pip_archive-0.0.0+d02c707b.lx64.cp310/pip_prebundle:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/exts/omni.isaac.core_archive/pip_prebundle:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/exts/omni.isaac.ml_archive/pip_prebundle:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/exts/omni.pip.compute/pip_prebundle:/home/tianbot/isaacsim_ws/IsaacLab-2.0.0/_isaac_sim/exts/omni.pip.cloud/pip_prebundle此时再运行train.py,发现可以正常运行了。

(.ros2) tianbot@ros2go:~/isaacsim_ws/IsaacLab-2.0.0$ python3 scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Ant-v0
[INFO][AppLauncher]: Loading experience file: /home/tianbot/isaacsim_ws/IsaacLab-2.0.0/apps/isaaclab.python.kit
Loading user config located at: '/home/tianbot/isaacsim_ws/isaac-sim-standalone@4.5.0/kit/data/Kit/Isaac-Sim/4.5/user.config.json'
[Info] [carb] Logging to file: /home/tianbot/isaacsim_ws/isaac-sim-standalone@4.5.0/kit/logs/Kit/Isaac-Sim/4.5/kit_20250213_180727.log
2025-02-13 10:07:27 [0ms] [Warning] [omni.kit.app.plugin] No crash reporter present, dumps uploading isn't available.
[0.043s] [ext: omni.kit.async_engine-0.0.1] startup
[0.279s] [ext: omni.metrics.core-0.0.1] startup
[0.279s] [ext: omni.client.lib-1.0.0] startup
...............虽然可以正常运行,但是发现会停留在[INFO]: Starting the simulation. This may take a few seconds. Please wait...处
Loading user config located at: '/home/tianbot/isaacsim_ws/isaac-sim-standalone@4.5.0/kit/data/Kit/Isaac-Sim/4.5/user.config.json'`这一步,无法继续运行下去。
[2025-02-14 13:40:59,479][ogn_registration][INFO] - Registering Python Node Types from omni.physxfabric at /home/tianbot/isaacsim_ws/isaac-sim-standalone@4.5.0/extsPhysics/omni.physx.fabric in omni.physx.fabric
[2025-02-14 13:40:59,479][ogn_registration][INFO] - ========================================================================================================================
[2025-02-14 13:40:59,480][ogn_registration][INFO] - No dependency on omni.graph, therefore no nodes to register in omni.physx.fabric
[2025-02-14 13:40:59,480][ogn_registration][INFO] - ...None found, no registration to do
[2025-02-14 13:40:59,480][ogn_registration][INFO] - ...Skipping: No OmniGraph presence in the module omni.physxfabric - No nodes in this module, do not remember it
[2025-02-14 13:40:59,480][ogn_registration][INFO] - Destroying registration record for omni.physx.fabric
[2025-02-14 13:40:59,481][ogn_registration][INFO] - OGN register omni.physx.fabric-106.5.7 took 2095135.000000
[INFO]: Base environment:
Environment device : cuda:0
Environment seed : 42
Physics step-size : 0.008333333333333333
Rendering step-size : 0.016666666666666666
Environment step-size : 0.016666666666666666
[INFO]: Time taken for scene creation : 1.854712 seconds
[INFO]: Scene manager: <class InteractiveScene>
Number of environments: 4096
Environment spacing : 5.0
Source prim name : /World/envs/env_0
Global prim paths : ['/World/ground']
Replicate physics : True
[INFO]: Starting the simulation. This may take a few seconds. Please wait...这时由于需要连接 ominiverse 下载IsaacSim Asset资产文件,所以会卡在[INFO]: Starting the simulation. This may take a few seconds. Please wait...处,无法继续运行下去。
修改 IsaacSim Asset 加载路径
所以为了解决这个问题,需要修改Isaac Lab中的IsaacSim Asset的加载路径。
需要修改文件
~/isaacsim_ws/IsaacLab-2.0.0/source/isaaclab/isaaclab/utils/assets.py
# 修改为
- NUCLEUS_ASSET_ROOT_DIR = carb.settings.get_settings().get("/persistent/isaac/asset_root/cloud")
+ NUCLEUS_ASSET_ROOT_DIR = "/home/tianbot/Downloads/Assets/IsaacSim/Assets/Isaac/4.5" # your IsaacSim Asset path
# 下面照旧即可
"""Path to the root directory on the Nucleus Server."""
NVIDIA_NUCLEUS_DIR = f"{NUCLEUS_ASSET_ROOT_DIR}/NVIDIA"
"""Path to the root directory on the NVIDIA Nucleus Server."""
ISAAC_NUCLEUS_DIR = f"{NUCLEUS_ASSET_ROOT_DIR}/Isaac"
"""Path to the ``Isaac`` directory on the NVIDIA Nucleus Server."""
ISAACLAB_NUCLEUS_DIR = f"{ISAAC_NUCLEUS_DIR}/IsaacLab"
"""Path to the ``Isaac/IsaacLab`` directory on the NVIDIA Nucleus Server."""~/isaac-sim-standalone@4.5.0/exts/isaacsim.asset.browser/cache/isaacsim.asset.browser.cache.json
- "url": "/home/tianbot/Downloads/Assets/IsaacSim/Assets/Isaac/4.5/Isaac/Robots",
+ "url": "https://omniverse-content-production.s3-us-west-2.amazonaws.com/Assets/Isaac/4.5/Isaac/Robots",~/home/tianbot/isaacsim_ws/isaac-sim-standalone@4.5.0/exts/isaacsim.asset.browser/config/extension.toml
其中的asset_root修改方法类似,不再赘述。
修改并保存后,重新运行,发现可以流畅的玩耍了。
(.ros2) tianbot@ros2go:~/isaacsim_ws/IsaacLab-2.0.0$ python3 scripts/reinforcement_learning/rsl_rl/train.py --task=Isaac-Ant-v0

常见问题
isaacsim.asset.browser/cache 问题
开始下载

下载成功

重启 isaac sim

PYTHONPATH 问题
1. ModuleNotFoundError: No module named 'isaacsim'
- No module named ‘omni.isaac’
- 可以参考[Bug Report] ModuleNotFoundError:No module named 'omni.isaac.kit‘ ; Had tried the issue #103 Solution #516