用 isaacgym 复现 humanoid-gym
项目简介
Humanoid-Gym 是一个基于 Nvidia Isaac Gym 的易于使用的强化学习 (RL) 框架,旨在训练人形机器人的运动技能,强调从模拟到现实环境的零样本迁移。Humanoid-Gym 还将 Isaac Gym 的模拟到模拟框架集成到 Mujoco,允许用户在不同的物理模拟中验证训练后的策略,以确保策略的稳健性和泛化。 此代码库已由 RobotEra 的 XBot-S(1.2 米高的人形机器人)和 XBot-L(1.65 米高的人形机器人)在现实环境中通过零样本模拟到现实迁移进行了验证。向项目原作者致谢!
注意
下文中的操作在 ROS2GO 512G ISAAC 特别定制版本中有效,不再另行通知。使用 Isaac gym 的方式是基于/home/tianbot/.isaacgym 这一 Python3.8 环境安装的,所以 请勿随意删除 ~/.isaacgym及~/isaacgym_ws 的任意出厂内置文件,否则可能会造成原本内置好的 isaacgym 训练环境崩溃!!!!!!
提示
如果希望在终端中直接使用 Isaac Sim,首先需要执行以下命令,无需自己重新再配置环境:
source ~/.isaac_env_toolkit && isaac_gym_env切换到.isaacgym 虚拟环境
如果希望在终端中直接使用 Isaac gym,首先需要执行以下命令,无需自己重新再配置环境,无需 pip install -e 安装此项目:
source ~/.isaac_env_toolkit && isaac_gym_env提示
使用如下命令检查 pip 和 python 的安装路径,确认使用的是虚拟环境中的 pip 和 python
which pip
which python
whereis pip
whereis python
pip --version注意
如需安装新的依赖项,请自行确定是否会破坏已经内置的环境,如果由于操作不当,造成环境依赖出现问题,请及时在相关售后群里提问,或参考 timeshift 恢复操作进行恢复
pip --version
pip list # 查看当前 pip 下已安装的模块训练策略
- 在 4096 个 环境中为
v1任务启动 PPO 策略训练 - 此命令为任务启动基于 PPO 算法的训练
cd ~/isaacgym_ws/src/humanoid-gym/humanoid
python scripts/train.py --task=humanoid_ppo --run_name v1 --headless --num_envs 4096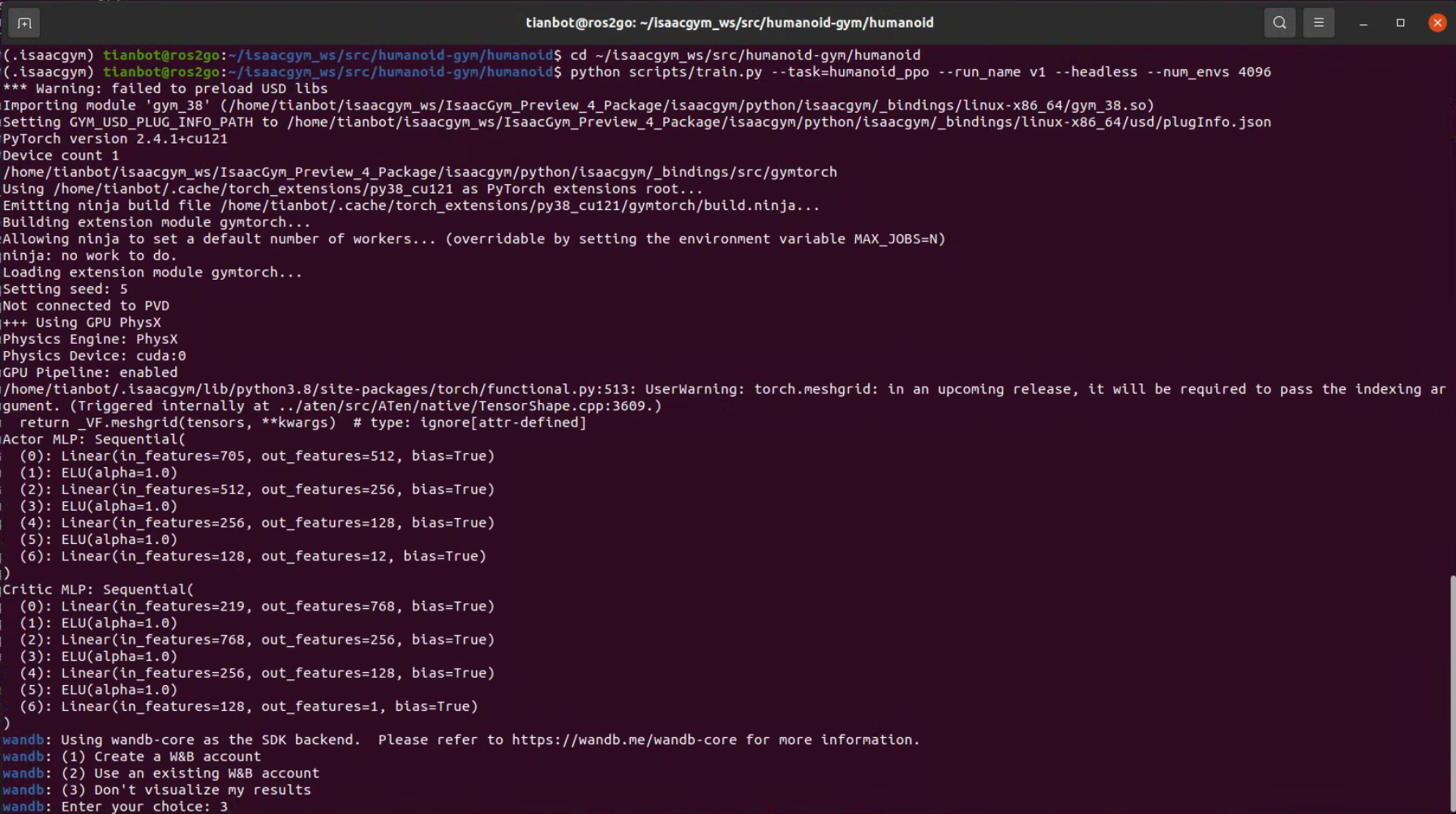
验证策略
验证v1任务训练得到的 PPO 策略,另外,它将自动从迭代的中间模型中导出一个 JIT 模型,以便用于实际部署
cd ~/isaacgym_ws/src/humanoid-gym/humanoid
python scripts/play.py --task=humanoid_ppo --run_name v1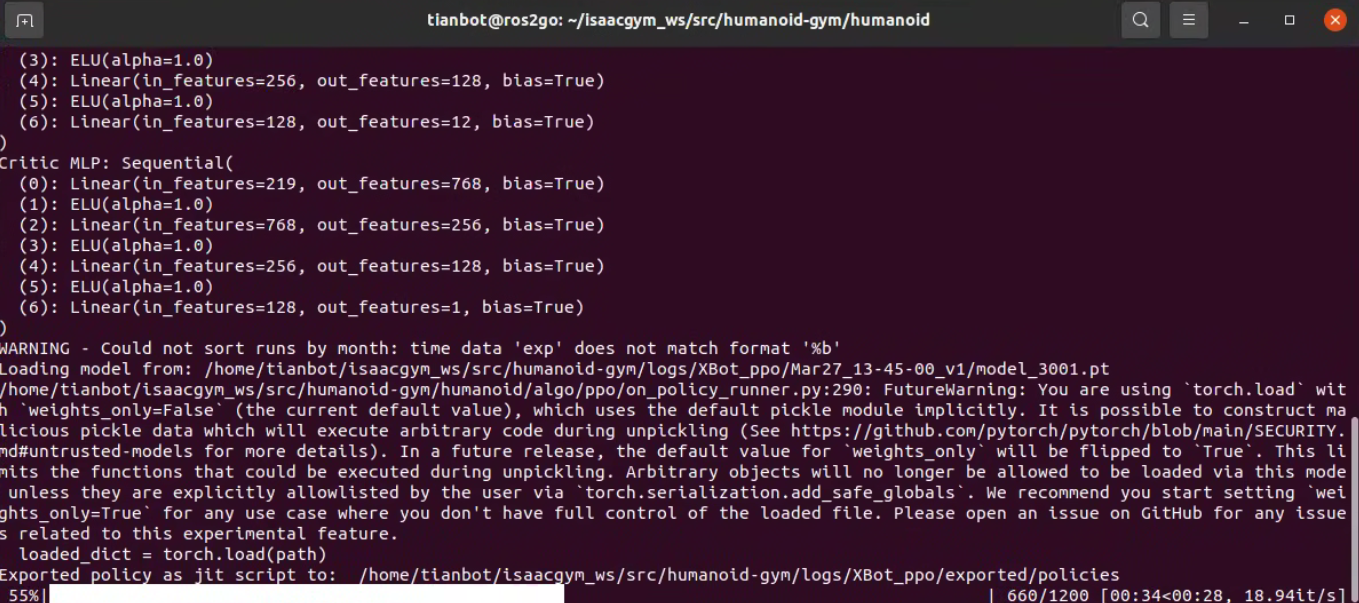
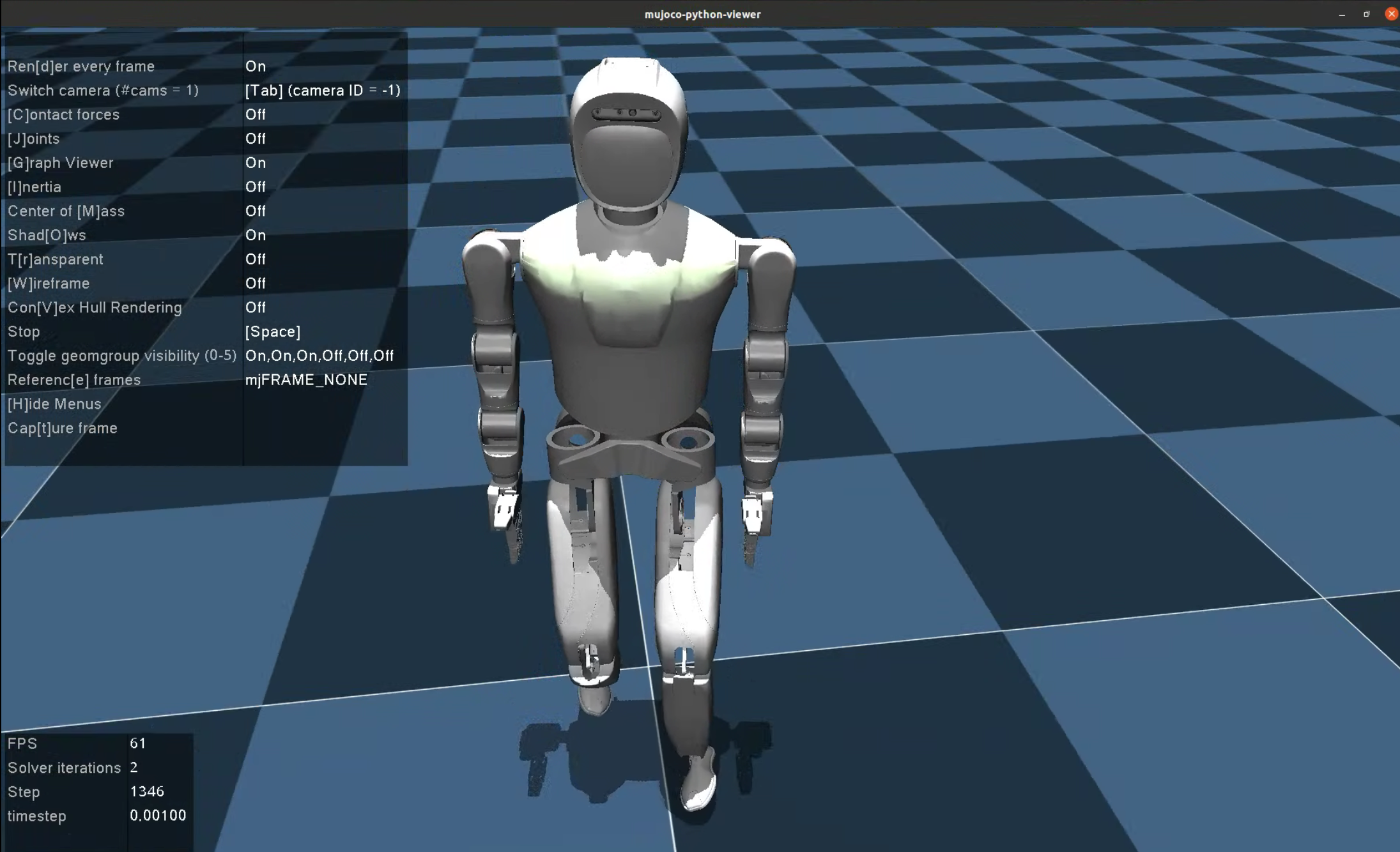
sim2sim
您必须先运行 play.py 才能获得 JIT 模型并将其与 sim2sim.py 一起使用
cd ~/isaacgym_ws/src/humanoid-gym/humanoid
python scripts/sim2sim.py --load_model /home/tianbot/isaacgym_ws/src/humanoid-gym/logs/XBot_ppo/Mar27_13-45-00_v1/model_3001.pt如果不按照要求先运行 play.py以得到 JIT 模型,直接运行会遇到问题 RuntimeError: PytorchStreamReader failed locating file data.pkl: file not found,是因为训练迭代过程中得到的模型不是 JIT 模型,需要使用play.py生成 JIT 模型,然后才能进行策略演示
cd ~/isaacgym_ws/src/humanoid-gym/humanoid
python scripts/sim2sim.py --load_model /home/tianbot/isaacgym_ws/src/humanoid-gym/logs/XBot_ppo/exported/policies/policy_1.pt