Isaac Sim 作为 Gazebo 替代方案的 ROS2 快速应用指南
注意
本篇内容基于 Isaac Sim 4.5.0 版本。
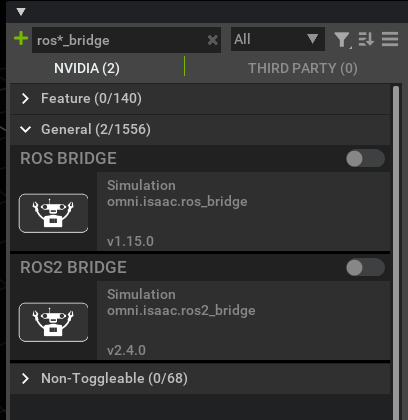
Ros Bridge Extensions
默认情况下启用 ROS2 Bridge。如果您正在运行 isaac-sim.sh,并希望两个 ROS2 Bridge 或切换到自动加载 ROS2 Bridge,请使用以下步骤:
打开位于~/isaacsim/apps/isaacsim.exp.full.kit文件
找到行 isaac.startup.ros_bridge_extension = "isaacsim.ros2.bridge" 并将其更改为 isaac.startup.ros_bridge_extension = "" 禁用两个桥梁,或 isaac.startup.ros_bridge_extension = "isaacsim.ros1.bridge" 自动加载 ROS1 Bridge。
保存并关闭文件。
在 ROS 2 中,默认情况下启用并安装了 Fast DDS。
但是,Isaac Sim 还支持 Cyclone DDS 中间件,用于 Linux,ROS 2 Humble。
Windows(WSL2)目前不支持 Cyclone DDS。
提示
omni.isaac.ros_bridge 扩展提供了一个连接 isaacsim 与 ROS 通信的接口,使得两者可以正常通信,就像gazebo_ros_pkgs 在 ROS 与 Gazebo 进行通信中所做的事情一样。
USD 和 URDF
在 Isaac Sim,采用一种对于场景或者模型的通用格式 USD(Universal Scene Description,最早由 Pixar 基于可扩展交换的需求提出)。
- 参考 USD 官方文档
而 URDF(Unified Robot Description Format)则是由 ROS 社区标准,基于 XML 格式,用于描述机器人模型的一种格式
USD vs URDF 模型格式对比
| 对比维度 | USD (Universal Scene Description) | URDF (Unified Robot Description Format) |
|---|---|---|
| 开发背景 | Pixar 提出 → NVIDIA 扩展 | ROS 社区标准 |
| 文件结构 | 分层组合式场景图(可引用/继承/覆盖) | 单文件树状结构 |
| 物理仿真 | 原生支持 PhysX 5.1 (GPU 加速) | 依赖 Gazebo 插件 (ODE/Bullet) |
| 材质系统 | 完整 PBR 材质支持 (Metallic/Roughness) | 仅基础颜色支持 |
| 传感器仿真 | 原生激光雷达/相机/IMU 等 20+ 传感器 | 需通过 Gazebo 插件扩展 |
| 扩展性 | 支持 Python/C++ 扩展 | XML 属性扩展 |
| 多机器人支持 | 原生实例化支持 | 需手动复制模型 |
| 版本兼容 | 向前兼容设计 | 不同 ROS 版本差异较大 |
| 协作编辑 | 支持 Omniverse 实时协作 | 单用户编辑 |
| 典型工作流 | URDF → USD 转换 → 场景优化 | 直接使用 URDF + Gazebo 插件 |
| 工具链支持 | Omniverse Composer / Isaac Sim | RViz / Gazebo |
| GPU 利用率 | 全流程 GPU 加速 (PhysX/RTX-Render) | 仅部分物理计算 GPU 加速 |
| 示例命令 | python /isaac-sim/tools/urdf_importer/import_urdf.py --urdf_path robot.urdf | <link name="base_link"><inertial>... |
| 优势场景 | • 复杂工业场景 • 高精度传感器仿真 • 数字孪生 | • 快速原型开发 • ROS 原生集成 • 学术研究 |
| 局限 | 学习曲线陡峭 | 扩展复杂场景困难 |
| 典型文件大小 | Carter 机器人:15MB (USD) | Carter 机器人:2MB (URDF) + 50MB 网格文件 |
| 实时调试 | 支持运行时参数热更新 | 需重启仿真 |
转换工具对照表
| 功能 | USD 工具链 | URDF 工具链 |
|---|---|---|
| 模型检查 | usdchecker | check_urdf |
| 可视化编辑 | Omniverse Composer | Blender-URDF 插件 |
| 物理验证 | PhysX Visual Debugger | Gazebo Physics Preview |
| 格式转换 | omni.isaac.urdf_importer 扩展 | urdf2webots 等第三方工具 |
注:Isaac Sim 4.5 推荐工作流:URDF → USD 转换 → 场景增强,兼顾开发效率与仿真性能
ROS Workspace
其中该存储库包含两个工作空间:noetic_ws(Ros Noetic)和 humble_ws(ROS2 Humble),可以根据需要选择其中一个使用。
git clone https://github.com/isaac-sim/IsaacSim-ros_workspaces.gitCarter_Navigation:包含 NVIDIA CARTER 机器人所需的启动文件和 ROS 2 导航参数。
CMDVEL_TO_ACKERMANN:包含一个脚本文件和启动文件,用于将命令速度消息(Twist MSG 类型)转换为 Ackermann 驱动器消息(AckermannDrivestamped MSG 类型)。
Custom_message:包含 NVIDIA CARTER 机器人所需的启动文件和 ROS 2 导航参数。
isaac_ros_navigation_goal:用于在 ROS 2 导航中自动设置随机或用户定义的目标姿势。
ISAAC_ROS2_MESSAGES:一个自定义的 ROS 2 服务接口,用于检索姿势以及列出 Prims 并操纵其属性。
Isaacsim:包含用于运行和启动以 ISAAC SIM 为 ROS2 节点的启动文件和脚本。
isaac_tutorials:包含启动文件,rviz2 配置文件和教程系列的脚本。
iw_hub_navigation:包含 IW.HUB 机器人所需的启动文件和 ROS 2 导航参数。
cd IsaacSim-ros_workspaces/humble_ws
colcon build --symlink-installOmni Graph 与 ROS2
您可以使用Omni graph节点在ISAAC SIM中设置一个简单的时钟发布者,如下所示。在 Isaac Sim 中点击播放。
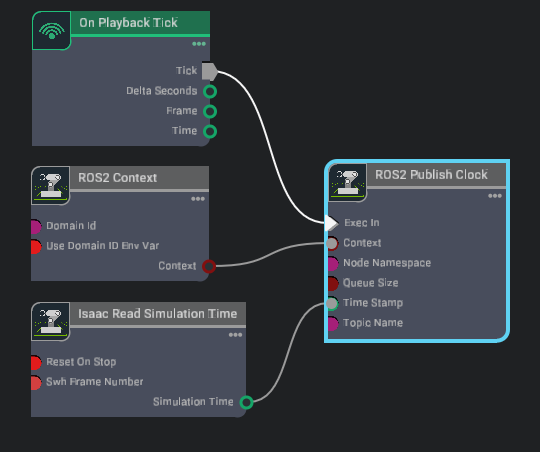
打开一个单独的终端,然后输入命令 ros2 topic echo /clock 就可以看到打印来自 Isaac Sim 的时间戳。
信息
该模块会基于前文中提到的 ROS2 bridge 创建一个名为/clock的发布者,其消息类型为builtin_interfaces/msg/Time