Hector SLAM演示例程
仿真演示
Heterogeneous Cooperating Team Of Robots(异构机器人协作团队)提出HectorSLAM方法,已经在ROS上集成,已成功的运用在了UGV、USV和一个小型的室内导航系统上,并可以在ROS的生态中替代其他SLAM方法。
- 官方文档:
http://wiki.ros.org/hector_slam
- 论文:
Kohlbrecher S , Stryk O V , Meyer J , et al. A flexible and scalable SLAM system with full 3D motion estimation[C]// IEEE International Symposium on Safety. IEEE, 2011.
- 代码地址:
https://github.com/tu-darmstadt-ros-pkg/hector_slam.git
- 官方数据集:
- 打开终端(ctrl + alt + t),输入以下命令,启动 HectorSLAM 算法程序,启动rviz可视化界面:
shell
roslaunch hector_slam_launch tutorial.launch显示效果如下:
- 打开一个新的终端(ctrl + alt + t),输入以下命令,到数据包所在的目录下:
shell
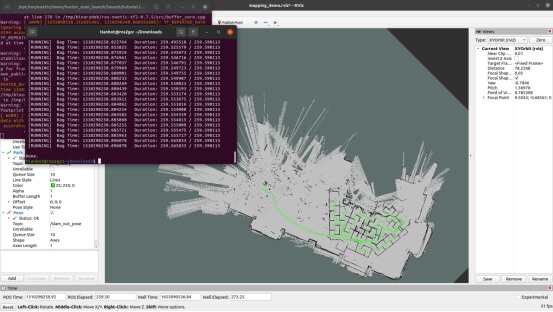
cd ~/Downloads- 接着在当前终端下输入以下命令,播放数据包,程序接收数据包发布的话题,开始建图过程:
shell
rosbag play Team_Hector_MappingBox_RoboCup_2011_Rescue_Arena.bag --clock显示效果如下:
使用设备:一个Hokuyo UTM-30LX激光雷达系统、一个基于Intel Atom Z530的CPU板以及一个小型低成本MEMS IMU组成,如图所示:

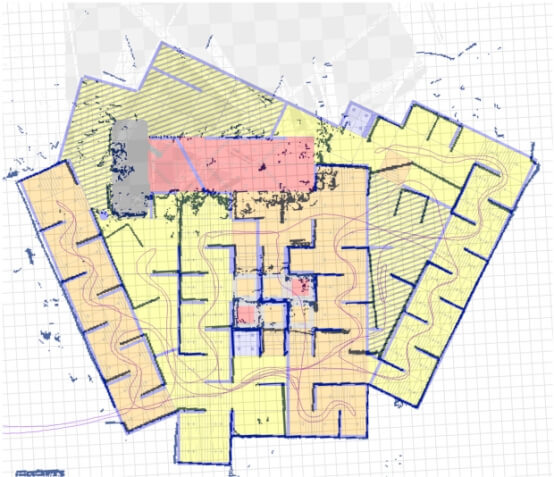
bag数据包是手持设备在RoboCup 2011救援竞技场进行录制的,这是一个模拟地震⽕灾现场的场景, 如图所示是论文中给出构建的地图:
tutorial.launch文件主要包含三部分内容:
- 运行mapping_demo.rviz启动可视化界面
- 调用mapping_default.launch文件,这是进行slam的启动文件
- 是调用geotiff_mapper.launch文件,这是保存地图的启动文件。
mapping_default.launch文件包含:
- hector_mapping节点:程序进行定位和建图的主节点。
geotiff_mapper.launch文件包含:
- hector_trajectory_server节点:保存从tf数据中提取的tf轨迹;
- hector_geotiff_node节点:将建的地图和运动轨迹保存到geotiff图像文件。