USB摄像头
在ROS2GO中如何驱动
运行启动文件
打开终端输入以下命令
shell
roslaunch usb_cam usb_cam-test.launch此时可以正常看到USB摄像头的画面。
在非ROS2GO中如何驱动
二进制安装包安装(推荐)
打开终端输入以下命令
shell
sudo apt install ros-melodic-usb-cam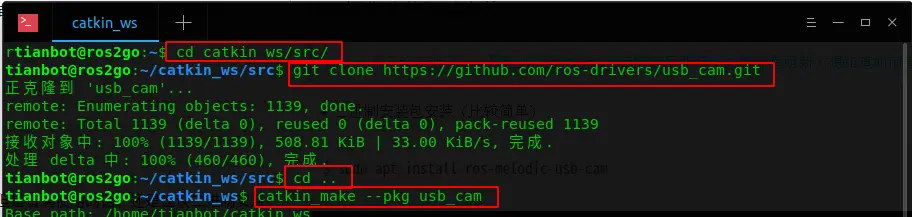
源码下载安装
源码安装主要是能见到驱动的代码细节,用于借鉴开发和定制修改,但是普通使用的话,还是建议二进制安装方法;
shell
cd catkin_ws/src
git clone https://github.com/ros-drivers/usb_cam.git
cd ..
catkin_make --pkg usb_cam
常见问题
如只能看到笔记本的摄像头画面,无法看到USB摄像头画面
主要因为是启动文件默认你的摄像头接口为/dev/video0,但/dev/video0在开机的时候已经被自带的摄像头占用,此时你新插上的usb摄像头肯定没有挂载在/dev/video0上,我们需要修改启动文件中的默认接口值来正确驱动我们自己的摄像头,可以按照以下命令修改对应文件,打开终端输入以下命令
shell
roscd usb_cam
cd launch/
sudo cp usb_cam-test.launch myusb_cam-test.launch
sudo gedit myusb_cam-test.launch
# 修改`video_device`参数值为`/dev/video2`
注:上面有一个步骤是复制启动文件,这里主要是个人习惯,对于官方的文档,我们一般都不要直接修改,而是先复制一份,在备份上修改自己的东西,这样有什么突发问题,可以和源文件作一个很好的比较借鉴,问题容易找到。当然如果熟悉了,直接在源文件上修改也没有问题。
启动修改后的文件
shell
roslaunch usb_cam myusb_cam-test.launch