HOKUYO
在ROS2GO中如何驱动
如您使用的是ROS2GO随身系统,我们已经在里面集成好了驱动,您只需要按照以下步骤进行简单操作即可在ROS中正常使用该型号激光雷达。 Hokuyo激光雷达十年前就在使用,整体偏向于工业,本篇文档中使用的具体型号为UTM-30LX。  UTM-30LX的供电线序如下图所示,仅供参考。
UTM-30LX的供电线序如下图所示,仅供参考。
| 线的颜色 | 接线方式 |
|---|---|
| 棕色(Brown) | DC 12V |
| 蓝色(Blue) | 0V |
| 绿色(Green) | OUTPUT |
| 白色(White) | COM- |
在ROS2GO中已安装了hukuyo雷达的驱动,位于/home/tianbot/tianbot_ws/src/urg_node | |
| ,我们按照上图给雷达供电同时将其连接到电脑上。 |
1、运行启动文件
打开终端,执行以下命令:
roslaunch urg_node urg_lidar.launch2、使用RVIZ查看点云数据
打开终端,执行以下命令,修改Fixed Frame为laser,添加LaserScan类型并选取/scan话题
rviz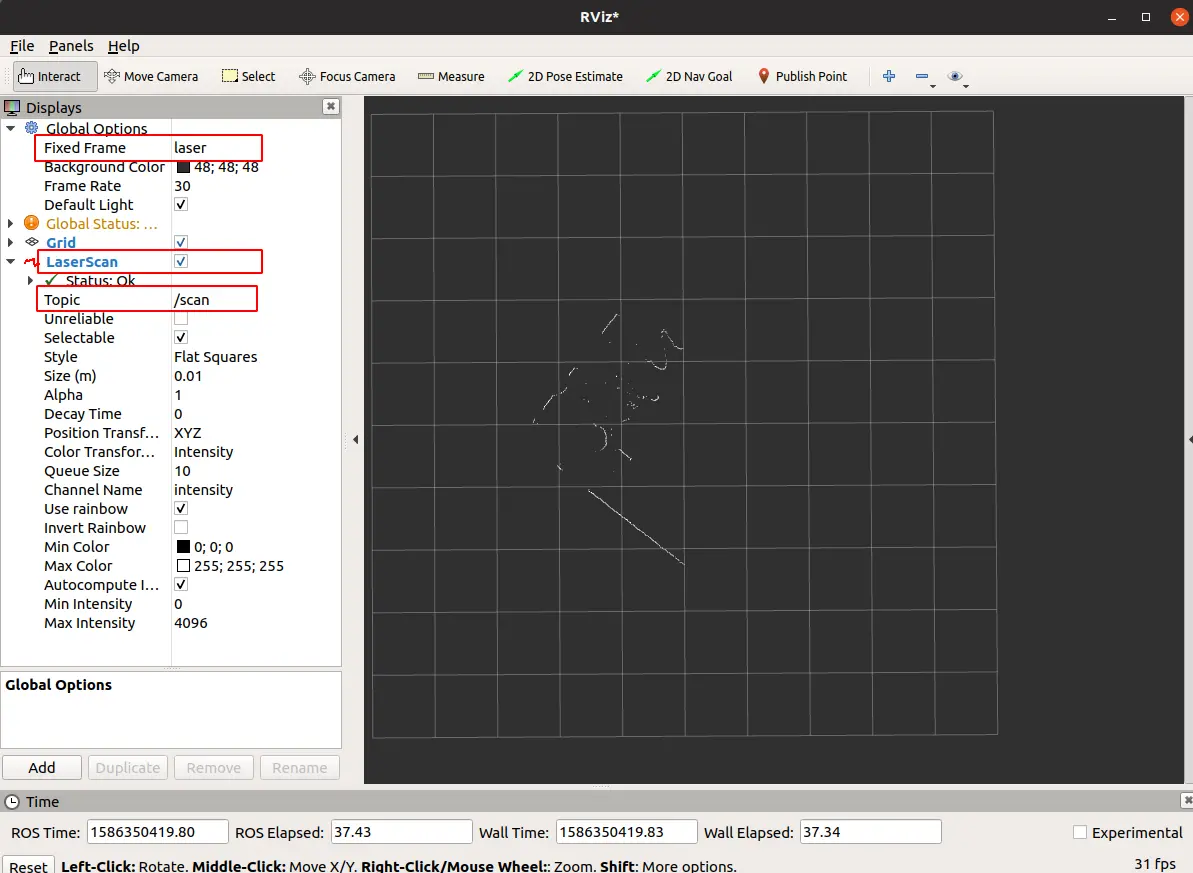
在非ROS2GO中如何驱动
如果您使用的非ROS2GO随身系统,同时电脑也未安装驱动,您可以按照以下步骤进行操作即可正常使用该型号激光雷达。
1、创建工作空间,下载源码,编译
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
git clone https://github.com/ncnynl/urg_node.git
cd ..
catkin_make
2、添加环境变量
sudo gedit ~/.bashrc
# 输入用户密码,ROS2GO用户密码为ros
# 添加环境
source ~/catkin_ws/devel/setup.bash --extend`
# 保存退出
3、使用RVIZ查看点云数据
打开终端,执行以下命令
shell
roslaunch urg_node urg_lidar.launch
rviz修改Fixed Frame为laser,添加LaserScan类型并选取/scan话题 
常见问题
如出现
Error connecting to Hokuyo,有可能其他设备先占用了/dev/ttyACM0。

解决方法:移除其他设备,重新插拔雷达,再运行;我也可以将端口映射为/dev/ttyACM1,修改的路径和地方见下图。 
端口映射参考:https://blog.csdn.net/guijiaqing/article/details/105848859