Turtlebot3 仿真实例
Turtlebot3 Gazebo仿真演示
turtlebot3有三种模型分别是burger, waffle或waffle_pi,我们在ROS2GO中默认启动的是burger,如果你想启动另外两种模型,可以指定参数如model:=waffle_pi
- 打开终端(ctrl + alt + t),输入以下命令,启动Turtlebot3 Gazebo仿真环境
roslaunch turtlebot3_gazebo turtlebot3_world.launch
或者
roslaunch turtlebot3_gazebo turtlebot3_house.launchTurtlebot3仿真环境world和house,任选其一都可以
- 再打开标签(ctrl + shift + n),输入以下命令,启动键盘控制节点
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch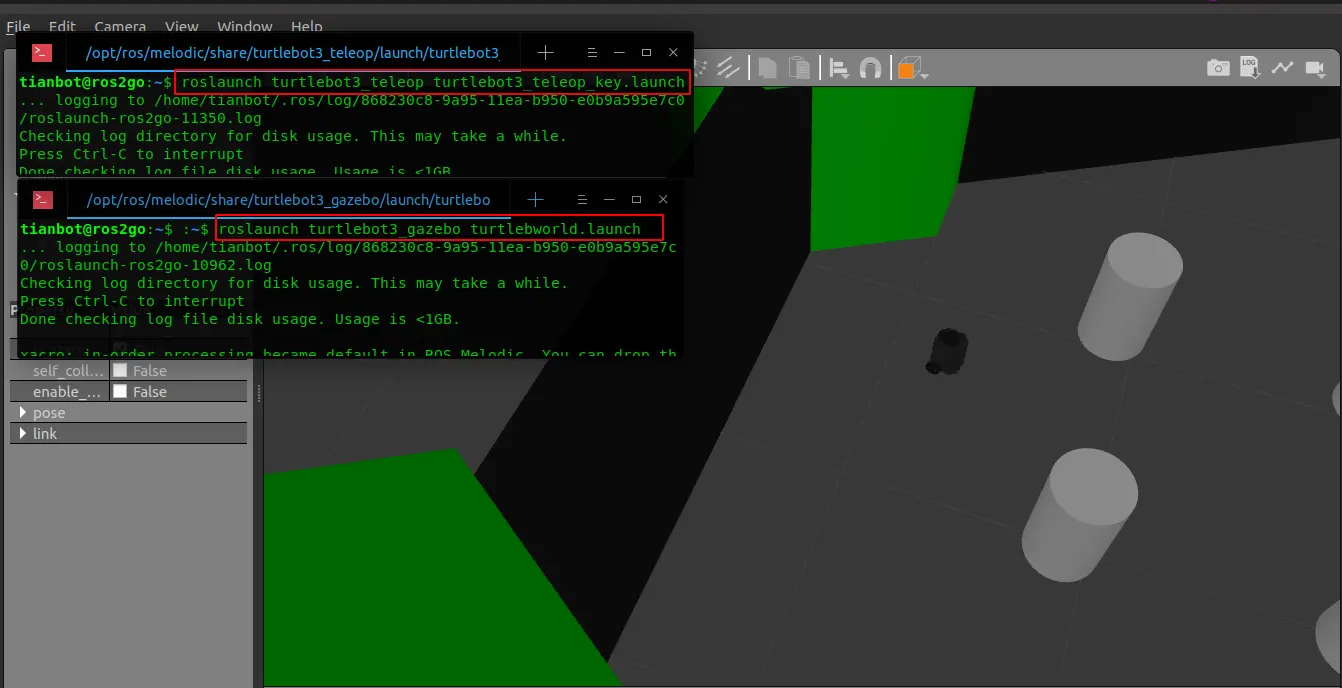
Turtlebot3 Gazebo建图演示
- 打开终端(ctrl + alt + t),输入以下命令,启动Turtlebot3 Gazebo仿真环境
roslaunch turtlebot3_gazebo turtlebot3_world.launch- 再打开标签(ctrl + shift + n),输入以下命令,启动建图功能节点
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping[info] slam的算法有很多,这里我们使用的是gmapping,如果想使用其他的slam算法,修改启动命令中的对应参数。
- 再打开标签(ctrl + shift + n),输入以下命令,启动键盘控制节点
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch- 再打开标签(ctrl + shift + n),输入以下命令,保存地图
rosrun map_server map_saver -f ~/map
Turtlebot3 Gazebo导航演示
- 打开终端(ctrl + alt + t),输入以下命令,启动Turtlebot3 Gazebo仿真环境
roslaunch turtlebot3_gazebo turtlebot3_world.launch- 再打开标签(ctrl + shift + n),输入以下命令,启动导航功能节点**
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=/home/tianbot/map.yaml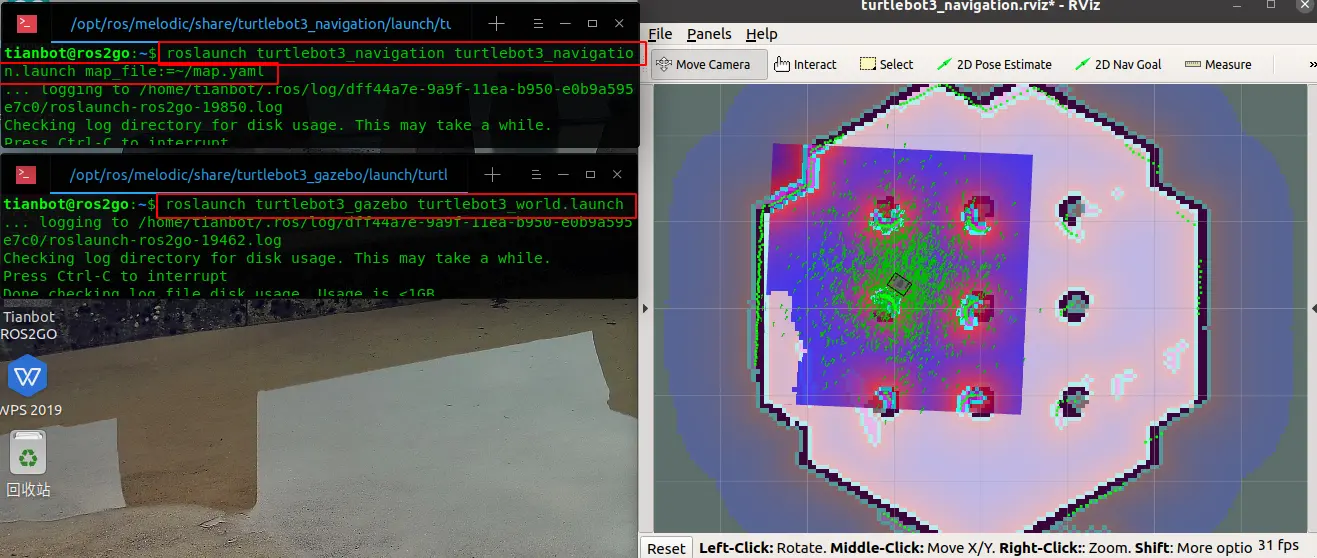
[danger] 这里加载的地图文件是上一章节保存的,这里一定要写绝对路径,如果你写
map_file:=~/map.yaml,将不会运行成功。