abc_swarm仿真实例
提示
如果运行过程中显示找不到xx.urdf的报错,请先在终端中执行下面的命令
shell
source ~/tianbot_mini_ws/devel/setup.bash1.mini小车跟随仿真
启动驱动
shell
roslaunch abc_swarm demo_sim_tf.launch启动键盘控制
shell
rosrun teleop_twist_keyboard teleop_twist_keyboard.py /cmd_vel:=/tbmn_01/cmd_vel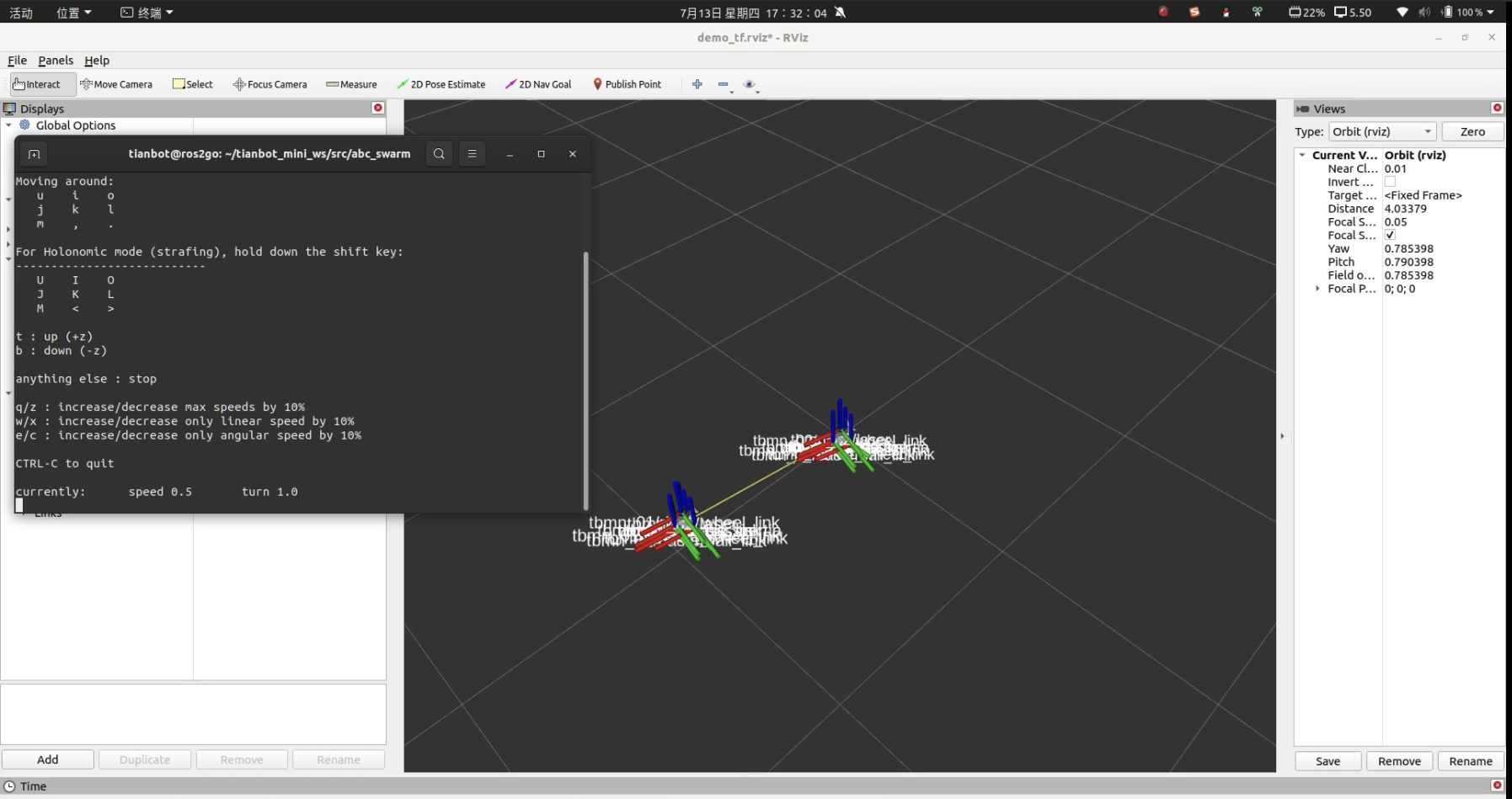
2.两台mini小车跟随一台mini保持阵型仿真
启动驱动
shell
roslaunch abc_swarm demo_sim_formation.launch启动键盘控制
shell
rosrun teleop_twist_keyboard teleop_twist_keyboard.py /cmd_vel:=/tbmn_01/cmd_vel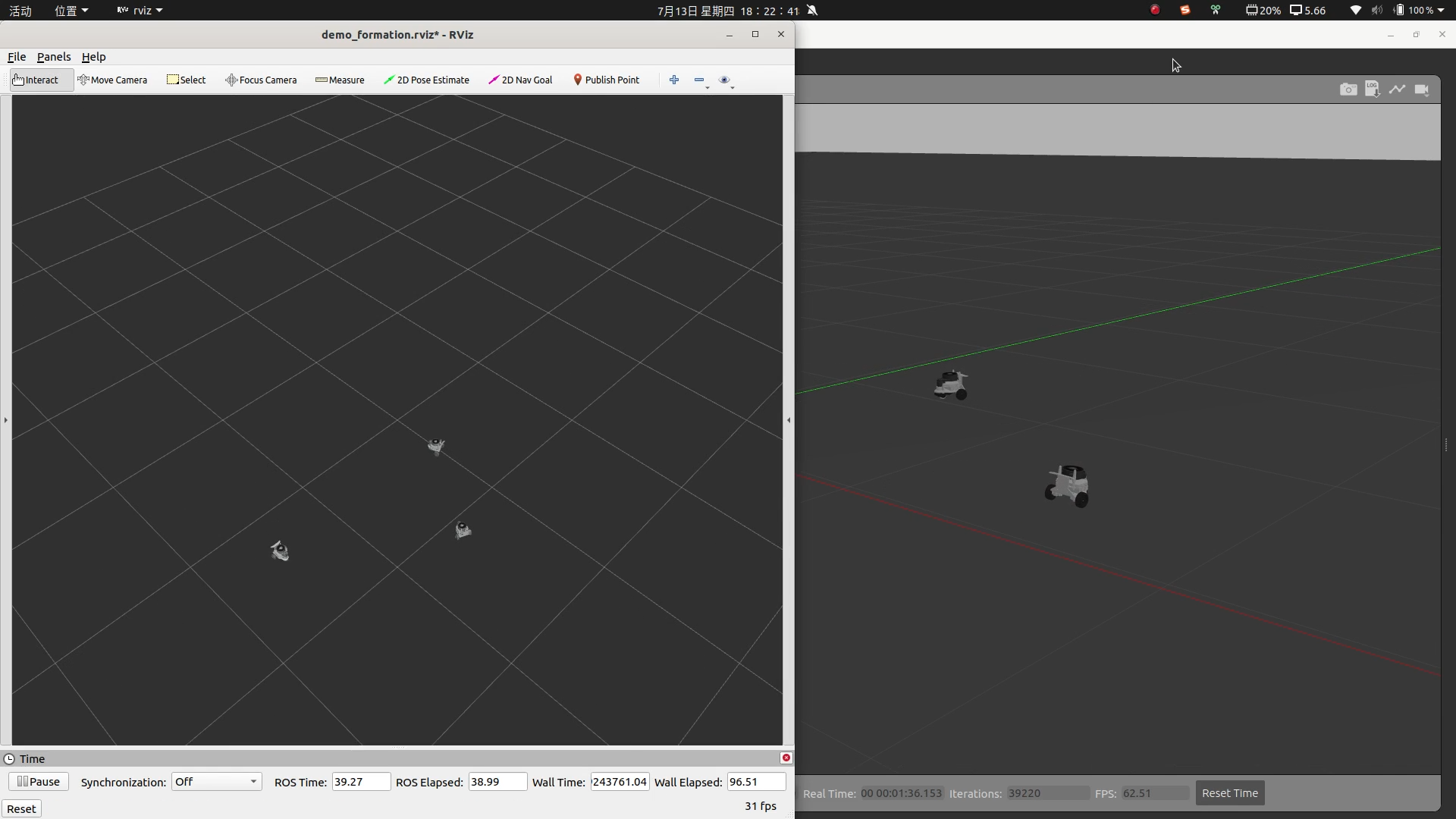
3.两台mini小车跟随一台mini小车仿真
启动驱动
shell
roslaunch abc_swarm demo_sim_leader_follower.launch启动键盘控制
shell
rosrun teleop_twist_keyboard teleop_twist_keyboard.py /cmd_vel:=/tbmn_01/cmd_vel
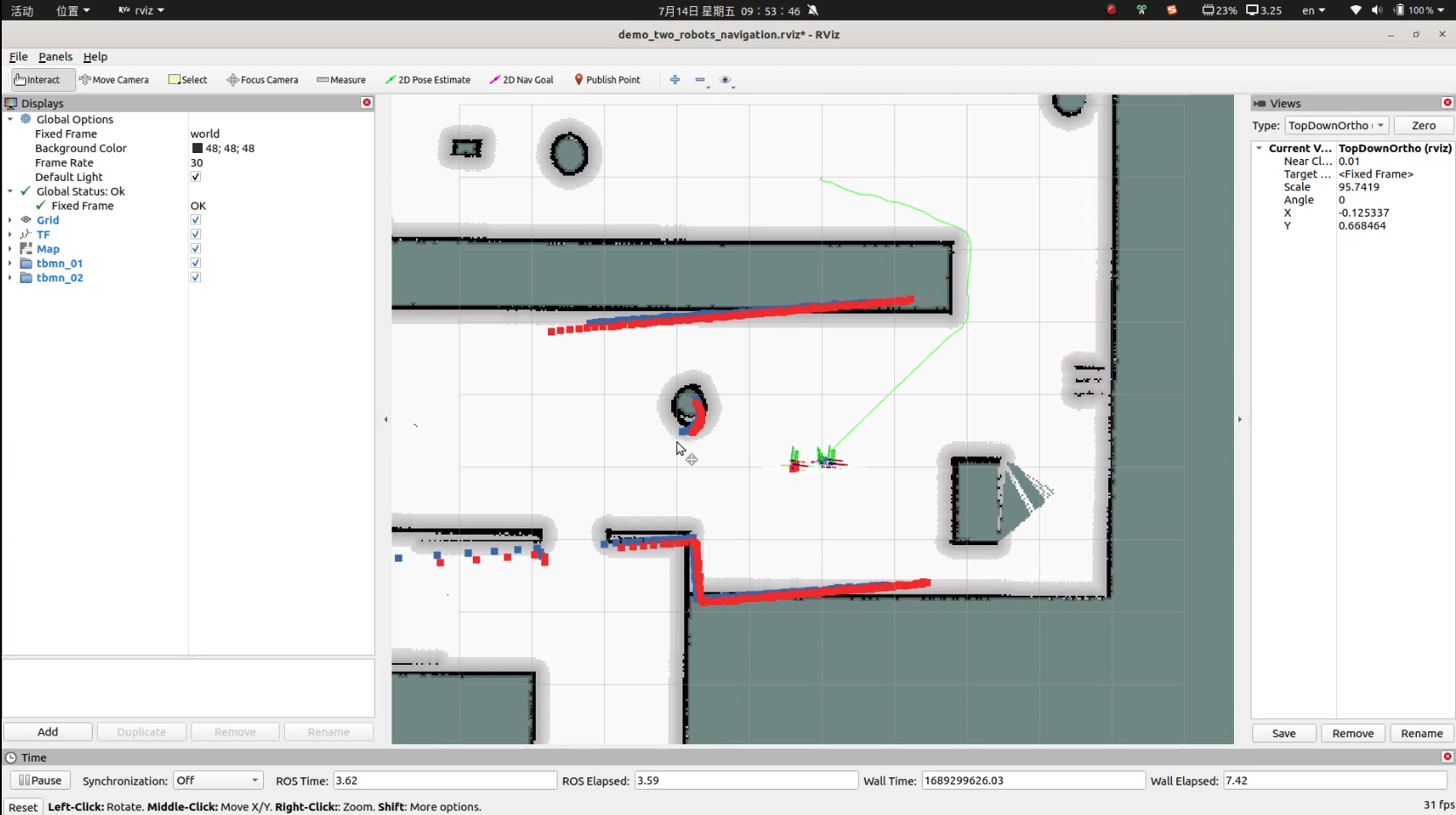
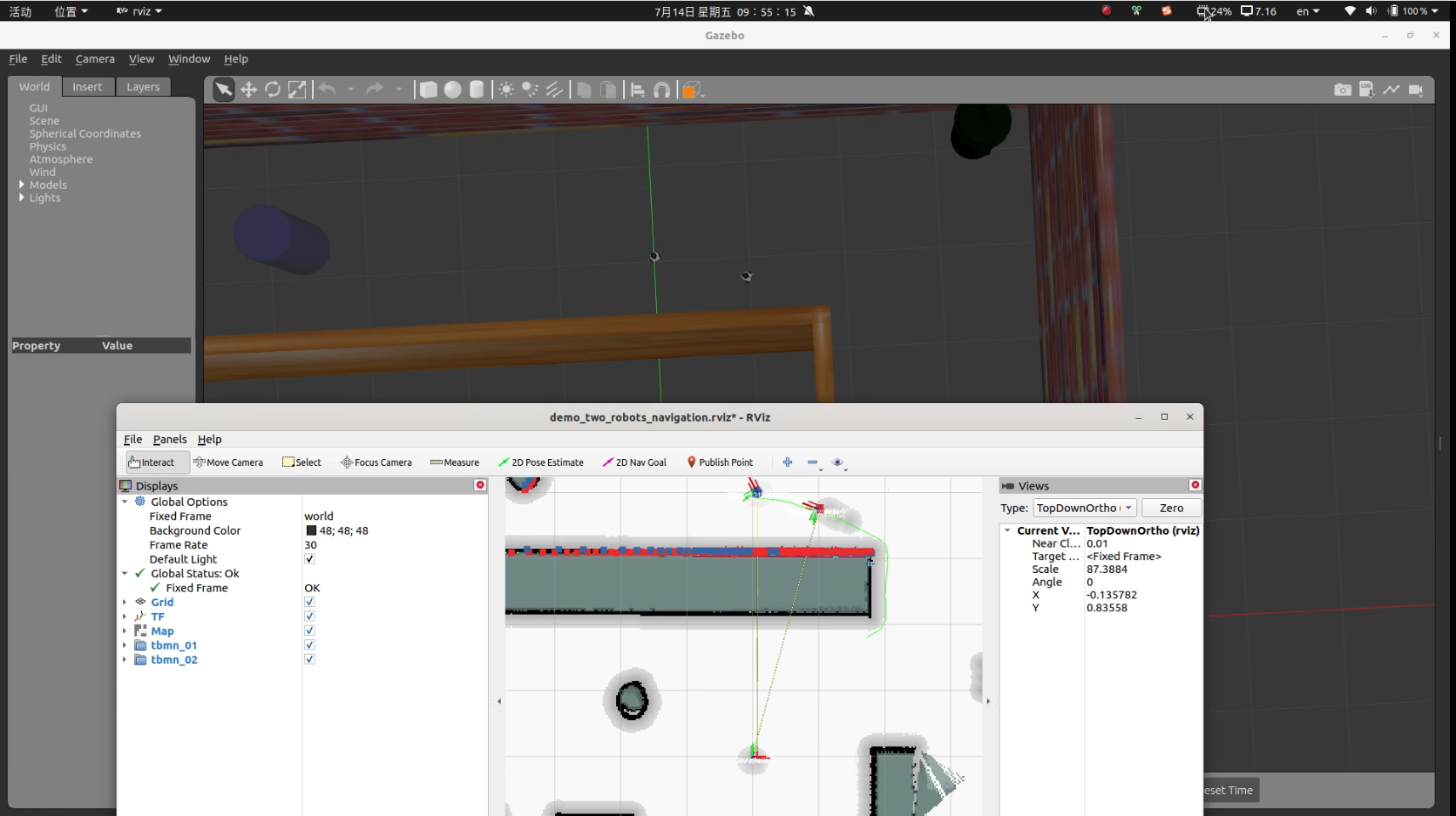
4.mini小车导航跟随仿真
启动驱动
shell
roslaunch abc_swarm demo_sim_two_robots_navigation.launch启动键盘控制
shell
rosrun teleop_twist_keyboard teleop_twist_keyboard.py /cmd_vel:=/tbmn_01/cmd_vel