tianracer使用手册
产品简介·

Tianracer面向教育、竞赛和科研的机器人是一种全功能的智能学习工具,适用于高年级的本科学生、科研人员和参与机器人竞赛的团队。无论是在课堂上还是实验室中,该机器人都能提供丰富的学习资源和实践机会,以推动创造力、合作能力和问题解决技巧的发展。
对于本科学生而言,该机器人提供了丰富的学习资料和良好的扩展性,非常适合二次开发。学生不仅可以通过该款无人车平台学习ROS,进行机器人理论与实践上的深度结合,也可借此不断强化工程能力,提升科研素养,培养他们的逻辑思维、创新能力和解决问题的技巧。
同时,这款机器人也是科研人员在实验室中的得力助手。它配备了多种传感器和工具,用于采集数据,为执行实验并进行复杂的分析做好铺垫。科研人员可以免除前期的复杂的平台搭建工作,专注于后续的算法验证和需求落地。
- FASTLAB 高飞老师 算法验证平台
对于参与竞赛的团队来说,Tianracer系列中的T110作为F1TENTH竞赛技术支持方推出的阿克曼平台,其良好的性能,能够帮助他们在竞争激烈的环境中脱颖而出。参赛队员可以利用机器人的功能和灵活性,实现复杂任务的自动化、编程控制的精确性和团队协作的高效性。这样,他们可以有效地解决问题、展示创新和实现优异的竞赛成绩。
- 2022年 F1TENTH中国赛 冠军车型
总之,这款面向教育、竞赛和科研的机器人为学生、科研人员和竞赛团队提供了一个全方位的学习和实践平台。它鼓励学习者主动参与、探索和创造,培养他们的科学思维和创新精神。不论是在教室、实验室还是竞赛舞台上,都能为用户带来丰富的学习体验和成就感。
📖 (点击打开/折叠)
产品概述
TIANRACER起源于MIT Racecar,参考Hypha Racecar平台,由TIANBOT团队改进开发,这款基于ROS的无人车平台,最大速度可达5M/S,提供开源控制程序、开发文档、支持创建地图、路径规划、自主导航等功能,可作为高等教育的无人车仿真车教育、比赛、科研平台
该系列车型采用NVIDIA Jetson控制器作为核心运算,不仅继承了NVIDIA控制器在深度学习领域的能力,又融入了ROS机器人操作系统的丰富生态,无疑是加速SLAM算法研究与无人车自动驾驶技术应用落地的优秀实践平台,帮助汽车行业及自动驾驶领域的合作伙伴结合车辆和硬件系统,快速搭建一套基于ROS的自研发、测试和部署的移动平台。
产品功能
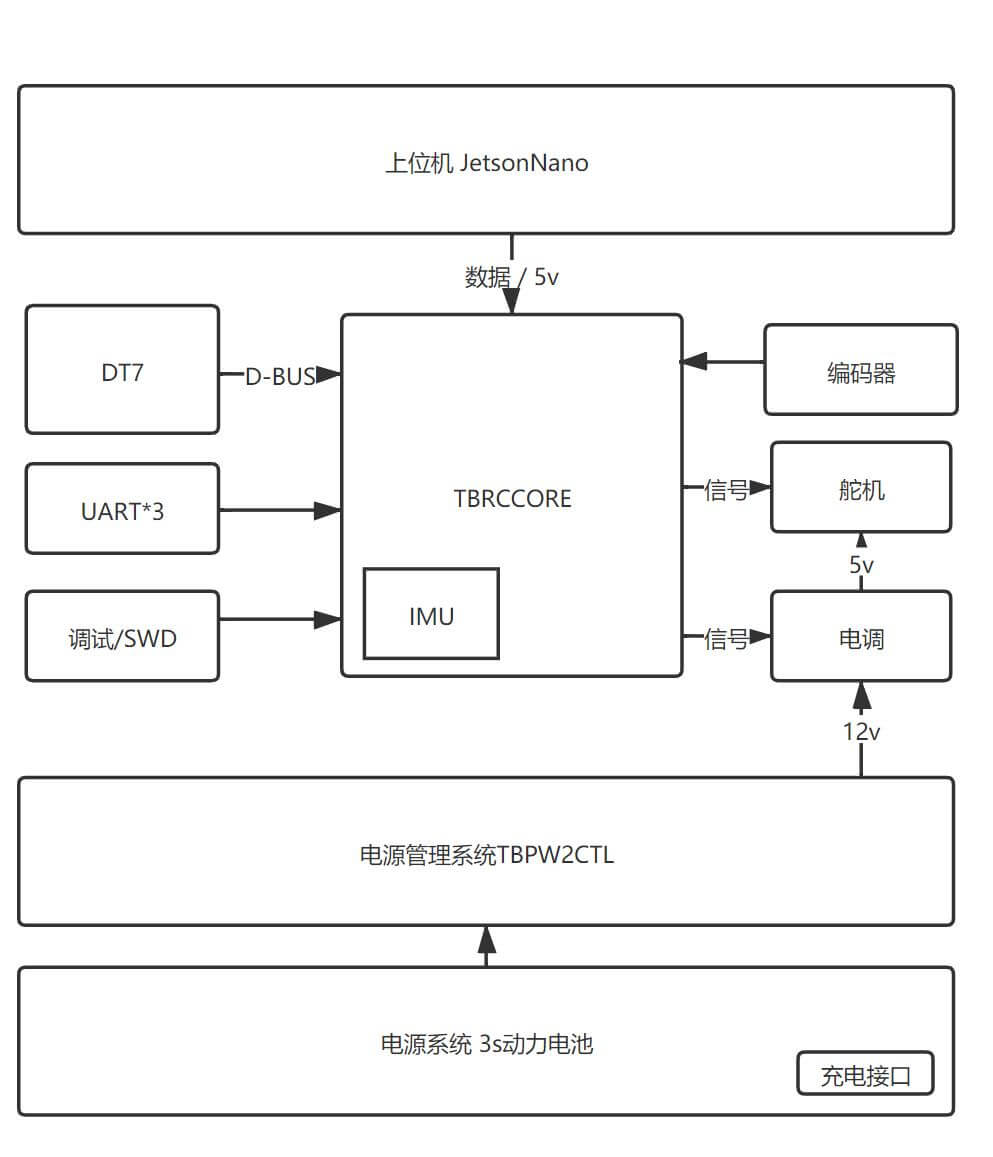
Tianracer底层计算平台为TIANBOT控制器,主控芯片为STM32,主要完成实时各种任务:
- 以编码器或IMU为反馈的闭环控制任务
- 主控平台与运算平台的通信任务
- 传感器(编码器、IMU、电压)数据采集任务
Tianracer车载运算设备为NVIDIA Jetson Nano扮演着上层计算平台的角色,负责较大运算量的各种算法执行:
- 环境感知,包括实时定位、建图、目标检测、识别和追踪
- 运动规划,包括全局规划(路径规划),局部规划(轨迹规划)
- 两个运算平台之间通过串口以规定的开源协议进行通信
平台同时提供了基于ROS的API接口,可以在ROS中利用C++或Python编程,进行二次开发。
系统架构
整车硬件部分采用主控平台+运算平台的框架,具体连接关系参考下图
项目地址
- 底层代码
暂不开源
- 上位机端(已预置)
ROS端的底层驱动预置于配套的运算平台,代码开源,包含
- 环境感知,如定位、建图;
- 运动规划,包括全局规划(路径规划),局部规划(轨迹规划)等,
更新比较频繁,可以随时点击下面链接获取最新代码
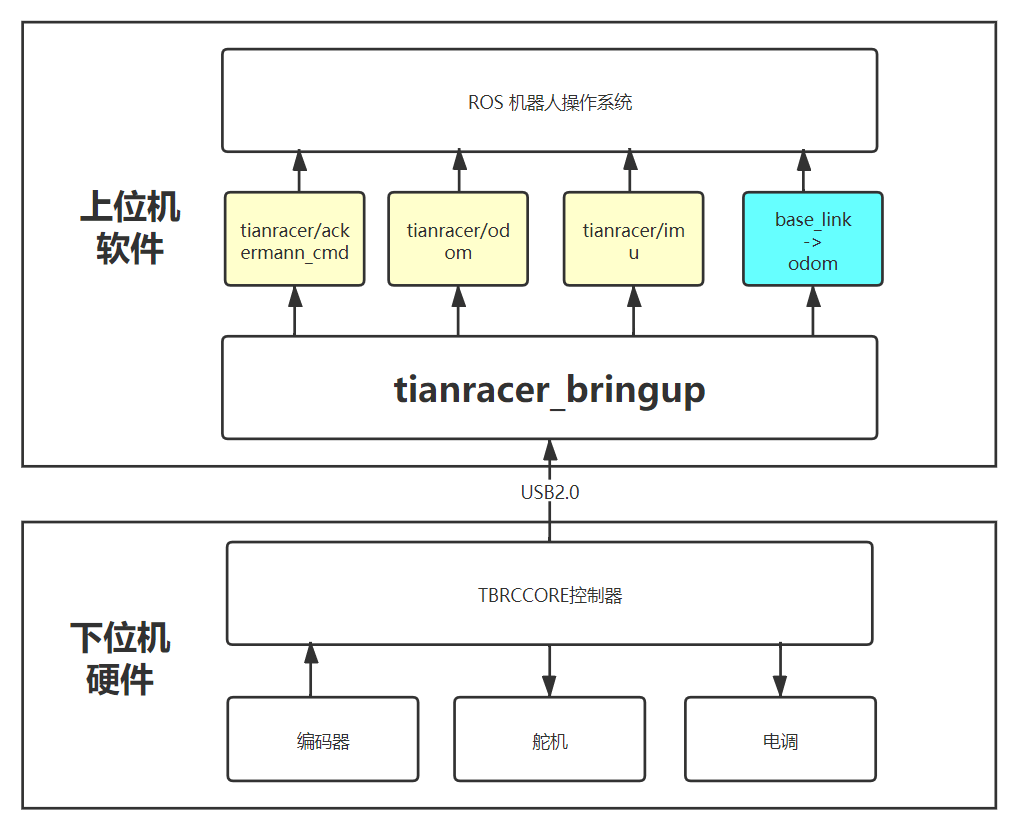
软件架构
软件部分采用上下位机的框架,具体数据流向关系参考下图
产品参数
📖 (点击打开/折叠)
| 产品型号 | Tianracer T105 | Tianracer T108 | Tianracer T110 |
|---|---|---|---|
| 产品展示 |  |  | |
| 产品尺寸 | - | 608 x 327 x 213mm | 380 x 210 x 195 |
| 产品净重 | - | 7.1kg | ❤️.5kg |
| 底盘结构 | - | 阿克曼结构 | 阿克曼结构 |
| 驱动方式 | - | 单无感无刷电机全时四驱 | 单无感无刷电机全时四驱 |
| 最大移动速度 | - | 5m/s max, 0.1m/s min | 3.5m/s |
| 底盘参数 | - | 轴距:396mm, 轮距:270mm, 轮径:135mm | - |
| 运行时间 | - | 不小于2小时,以具体情况而定 | 不小于2小时,以具体情况而定 |
| 供电电池 | - | 24V动力锂电池 | 5000mAh动力锂电池 |
| 充电适配器 | - | 25.2V 3A锂电适配器 | 2s-4s平衡充 |
| 是否防水防尘 | - | 防水、防尘 | 不防水、不防尘 |
| 运算平台 | |||
| 运算平台 | - | Jeston Xavier NX | Jeston Nano 4G |
| 控制平台 | |||
| 主控芯片 | - | STM32F407VET6 | STM32F407VET6 |
| 输入电压 | - | 5V | 5V |
| 接口 | - | DBUS、UART、PWM | DBUS、UART、PWM |
| 传感器 | |||
| 激光雷达 | - | 傲视 Osight IE102-H | 思岚 Rpliadr A1 / 锐驰 richbeam Lakibeam1 |
| 深度相机 | - | Intel Realsense D455 | 单目USB摄像头 |
| IMU | - | 6轴MPU6050 | 6轴MPU6050 |