SLAM快速体验
SLAM介绍
SLAM (Simultaneous Localization And Mapping,同步定位与地图构建)主要为了解决移动机器人在未知环境运行时定位与地图构建的问题。SLAM 并不是某一种特定的算法,而是一个概念。
常见算法以下:
2D:Gmapping、hectorSLAM、Cartographer(2D/3D)
3D:LOAM、LeGO-LOAM
视觉:VINS-FUNSION、ORB3-SLAM
本章节主要阐述2D的Gmapping、hectorSLAM、Cartographer
机器人导航三大步骤:1.定位 2.建图 3.路径规划导航,SLAM解决前两个步骤,也就是建图和定位。
我在什么地方?——定位。
周围环境是什么样?——建图。
当你闭上眼睛,处于一个陌生环境,你会怎么走动呢?你需要用手去感受环境,得到周围环境的感官认识。也就是机器人运用各种传感器(激光雷达,深度相机等)构建地图,你在走动的过程中不断整合新的环境信息判断这个地方是否来过,这就需要感知身处何处,也就是机器人的定位。
快速体验SLAM
按照快速启动所介绍的那样,让Tianbot_mini与电脑连接后 运行
shell
roslaunch tianbot_mini demo_slam.launchroslaunch tianbot_mini demo_slam.launch或者分布进行
打开终端输入以下命令:运行迷你机器人驱动
shell
roslaunch tianbot_mini bringup.launchroslaunch tianbot_mini bringup.launch打开新终端输入以下命令:运行雷达驱动
shell
roslaunch tianbot_mini lidar.launchroslaunch tianbot_mini lidar.launch打开新终端输入以下命令:运行SLAM
shell
roslaunch tianbot_mini slam.launchroslaunch tianbot_mini slam.launch打开新终端输入以下命令:运行键盘遥控
shell
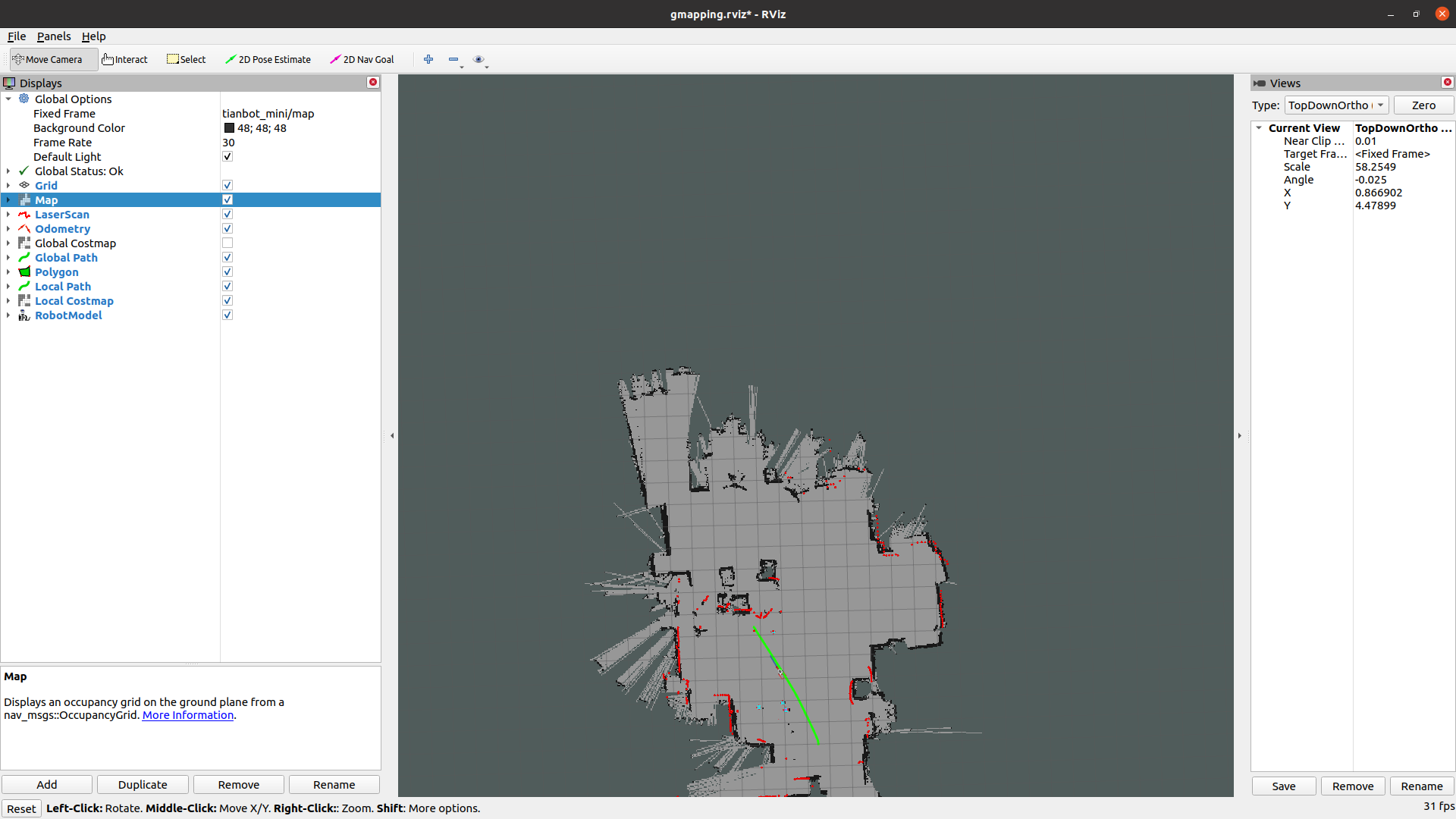
roslaunch tianbot_mini teleop.launchroslaunch tianbot_mini teleop.launch首先启用键盘控制节点控制Tianbot_mini移动完成对周围环境的建图,使用Rviz中粉红色的2D Nav Goal选一个点让mini移动到目标点处。